- About Problem Solving
- Related Topics

Problem Solving Resources
Case studies, problem solving related topics.
- Brainstorming
- Continuous Improvement
- Eight Disciplines (8D)
- Fishbone Diagram
- Nine Windows
- Shainin System™
- Total Quality Management (TQM)
- Quality Resources /
- Problem Solving
What is Problem Solving?
Quality Glossary Definition: Problem solving
Problem solving is the act of defining a problem; determining the cause of the problem; identifying, prioritizing, and selecting alternatives for a solution; and implementing a solution.
- The problem-solving process
- Problem solving resources

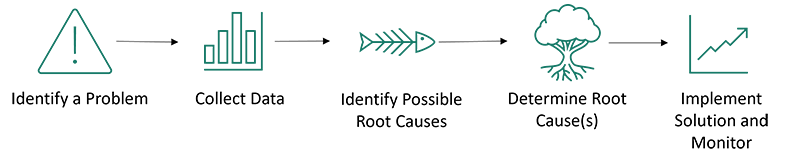
Problem Solving Chart

The Problem-Solving Process
In order to effectively manage and run a successful organization, leadership must guide their employees and develop problem-solving techniques. Finding a suitable solution for issues can be accomplished by following the basic four-step problem-solving process and methodology outlined below.
1. Define the problem
Diagnose the situation so that your focus is on the problem, not just its symptoms. Helpful problem-solving techniques include using flowcharts to identify the expected steps of a process and cause-and-effect diagrams to define and analyze root causes .
The sections below help explain key problem-solving steps. These steps support the involvement of interested parties, the use of factual information, comparison of expectations to reality, and a focus on root causes of a problem. You should begin by:
- Reviewing and documenting how processes currently work (i.e., who does what, with what information, using what tools, communicating with what organizations and individuals, in what time frame, using what format).
- Evaluating the possible impact of new tools and revised policies in the development of your "what should be" model.
2. Generate alternative solutions
Postpone the selection of one solution until several problem-solving alternatives have been proposed. Considering multiple alternatives can significantly enhance the value of your ideal solution. Once you have decided on the "what should be" model, this target standard becomes the basis for developing a road map for investigating alternatives. Brainstorming and team problem-solving techniques are both useful tools in this stage of problem solving.
Many alternative solutions to the problem should be generated before final evaluation. A common mistake in problem solving is that alternatives are evaluated as they are proposed, so the first acceptable solution is chosen, even if it’s not the best fit. If we focus on trying to get the results we want, we miss the potential for learning something new that will allow for real improvement in the problem-solving process.
3. Evaluate and select an alternative
Skilled problem solvers use a series of considerations when selecting the best alternative. They consider the extent to which:
- A particular alternative will solve the problem without causing other unanticipated problems.
- All the individuals involved will accept the alternative.
- Implementation of the alternative is likely.
- The alternative fits within the organizational constraints.
4. Implement and follow up on the solution
Leaders may be called upon to direct others to implement the solution, "sell" the solution, or facilitate the implementation with the help of others. Involving others in the implementation is an effective way to gain buy-in and support and minimize resistance to subsequent changes.
Regardless of how the solution is rolled out, feedback channels should be built into the implementation. This allows for continuous monitoring and testing of actual events against expectations. Problem solving, and the techniques used to gain clarity, are most effective if the solution remains in place and is updated to respond to future changes.
You can also search articles , case studies , and publications for problem solving resources.
Innovative Business Management Using TRIZ
Introduction To 8D Problem Solving: Including Practical Applications and Examples
The Quality Toolbox
Root Cause Analysis: The Core of Problem Solving and Corrective Action
One Good Idea: Some Sage Advice ( Quality Progress ) The person with the problem just wants it to go away quickly, and the problem-solvers also want to resolve it in as little time as possible because they have other responsibilities. Whatever the urgency, effective problem-solvers have the self-discipline to develop a complete description of the problem.
Diagnostic Quality Problem Solving: A Conceptual Framework And Six Strategies ( Quality Management Journal ) This paper contributes a conceptual framework for the generic process of diagnosis in quality problem solving by identifying its activities and how they are related.
Weathering The Storm ( Quality Progress ) Even in the most contentious circumstances, this approach describes how to sustain customer-supplier relationships during high-stakes problem solving situations to actually enhance customer-supplier relationships.
The Right Questions ( Quality Progress ) All problem solving begins with a problem description. Make the most of problem solving by asking effective questions.
Solving the Problem ( Quality Progress ) Brush up on your problem-solving skills and address the primary issues with these seven methods.
Refreshing Louisville Metro’s Problem-Solving System ( Journal for Quality and Participation ) Organization-wide transformation can be tricky, especially when it comes to sustaining any progress made over time. In Louisville Metro, a government organization based in Kentucky, many strategies were used to enact and sustain meaningful transformation.
Certification
Quality Improvement Associate Certification--CQIA
Certified Quality Improvement Associate Question Bank
Lean Problem-Solving Tools
Problem Solving Using A3
NEW Root Cause Analysis E-Learning
Quality 101
Making the Connection In this exclusive QP webcast, Jack ReVelle, ASQ Fellow and author, shares how quality tools can be combined to create a powerful problem-solving force.
Adapted from The Executive Guide to Improvement and Change , ASQ Quality Press.
Featured Advertisers
Guide: Problem Solving

Author: Daniel Croft
Daniel Croft is an experienced continuous improvement manager with a Lean Six Sigma Black Belt and a Bachelor's degree in Business Management. With more than ten years of experience applying his skills across various industries, Daniel specializes in optimizing processes and improving efficiency. His approach combines practical experience with a deep understanding of business fundamentals to drive meaningful change.
Problem-solving stands as a fundamental skill, crucial in navigating the complexities of both everyday life and professional environments. Far from merely providing quick fixes, it entails a comprehensive process involving the identification, analysis, and resolution of issues.
This multifaceted approach requires an understanding of the problem’s nature, the exploration of its various components, and the development of effective solutions. At its core, problem-solving serves as a bridge from the current situation to a desired outcome, requiring not only the recognition of an existing gap but also the precise definition and thorough analysis of the problem to find viable solutions.
What is Problem Solving?

At its core, problem-solving is about bridging the gap between the current situation and the desired outcome. It starts with recognizing that a discrepancy exists, which requires intervention to correct or improve. The ability to identify a problem is the first step, but it’s equally crucial to define it accurately. A well-defined problem is half-solved, as the saying goes.
Analyzing the problem is the next critical step. This analysis involves breaking down the problem into smaller parts to understand its intricacies. It requires looking at the problem from various angles and considering all relevant factors – be they environmental, social, technical, or economic. This comprehensive analysis aids in developing a deeper understanding of the problem’s root causes, rather than just its symptoms.

Finally, effective problem-solving involves the implementation of the chosen solution and its subsequent evaluation. This stage tests the practicality of the solution and its effectiveness in the real world. It’s a critical phase where theoretical solutions meet practical application.
The Nature of Problems
The nature of the problem significantly influences the approach to solving it. Problems vary greatly in their complexity and structure, and understanding this is crucial for effective problem-solving.
Simple vs. Complex Problems : Simple problems are straightforward, often with clear solutions. They usually have a limited number of variables and predictable outcomes. On the other hand, complex problems are multi-faceted. They involve multiple variables, stakeholders, and potential outcomes, often requiring a more sophisticated analysis and a multi-pronged approach to solving.
Structured vs. Unstructured Problems : Structured problems are well-defined. They follow a specific pattern or set of rules, making their outcomes more predictable. These problems often have established methodologies for solving. For example, mathematical problems usually fall into this category. Unstructured problems, in contrast, are more ambiguous. They lack a clear pattern or set of rules, making their outcomes uncertain. These problems require a more exploratory approach, often involving trial and error, to identify potential solutions.
Understanding the type of problem at hand is essential, as it dictates the approach. For instance, a simple problem might require a straightforward solution, while a complex problem might need a more comprehensive, step-by-step approach. Similarly, structured problems might benefit from established methodologies, whereas unstructured problems might need more innovative and creative problem-solving techniques.
The Problem-Solving Process
The process of problem-solving is a methodical approach that involves several distinct stages. Each stage plays a crucial role in navigating from the initial recognition of a problem to its final resolution. Let’s explore each of these stages in detail.
Step 1: Identifying the Problem

Step 2: Defining the Problem
Once the problem is identified, the next step is to define it clearly and precisely. This is a critical phase because a well-defined problem often suggests its solution. Defining the problem involves breaking it down into smaller, more manageable parts. It also includes understanding the scope and impact of the problem. A clear definition helps in focusing efforts and resources efficiently and serves as a guide to stay on track during the problem-solving process.
Step 3: Analyzing the Problem

Step 4: Generating Solutions

Step 5: Evaluating and Selecting Solutions
After generating a list of possible solutions, the next step is to evaluate each one critically. This evaluation includes considering the feasibility, costs, benefits, and potential impact of each solution. Techniques like cost-benefit analysis, risk assessment, and scenario planning can be useful here. The aim is to select the solution that best addresses the problem in the most efficient and effective way, considering the available resources and constraints.
Step 6: Implementing the Solution

Step 7: Reviewing and Reflecting
The final stage in the problem-solving process is to review the implemented solution and reflect on its effectiveness and the process as a whole. This involves assessing whether the solution met its intended goals and what could have been done differently. Reflection is a critical part of learning and improvement. It helps in understanding what worked well and what didn’t, providing valuable insights for future problem-solving efforts.

Tools and Techniques for Effective Problem Solving
Problem-solving is a multifaceted endeavor that requires a variety of tools and techniques to navigate effectively. Different stages of the problem-solving process can benefit from specific strategies, enhancing the efficiency and effectiveness of the solutions developed. Here’s a detailed look at some key tools and techniques:
Brainstorming

SWOT Analysis (Strengths, Weaknesses, Opportunities, Threats)

Root Cause Analysis
This is a method used to identify the underlying causes of a problem, rather than just addressing its symptoms. One popular technique within root cause analysis is the “ 5 Whys ” method. This involves asking “why” multiple times (traditionally five) until the fundamental cause of the problem is uncovered. This technique encourages deeper thinking and can reveal connections that aren’t immediately obvious. By addressing the root cause, solutions are more likely to be effective and long-lasting.
Mind Mapping

Each of these tools and techniques can be adapted to different types of problems and situations. Effective problem solvers often use a combination of these methods, depending on the nature of the problem and the context in which it exists. By leveraging these tools, one can enhance their ability to dissect complex problems, generate creative solutions, and implement effective strategies to address challenges.
Developing Problem-Solving Skills
Developing problem-solving skills is a dynamic process that hinges on both practice and introspection. Engaging with a diverse array of problems enhances one’s ability to adapt and apply different strategies. This exposure is crucial as it allows individuals to encounter various scenarios, ranging from straightforward to complex, each requiring a unique approach. Collaborating with others in teams is especially beneficial. It broadens one’s perspective, offering insights into different ways of thinking and approaching problems. Such collaboration fosters a deeper understanding of how diverse viewpoints can contribute to more robust solutions.
Reflection is equally important in the development of problem-solving skills. Reflecting on both successes and failures provides valuable lessons. Successes reinforce effective strategies and boost confidence, while failures are rich learning opportunities that highlight areas for improvement. This reflective practice enables one to understand what worked, what didn’t, and why.
Critical thinking is a foundational skill in problem-solving. It involves analyzing information, evaluating different perspectives, and making reasoned judgments. Creativity is another vital component. It pushes the boundaries of conventional thinking and leads to innovative solutions. Effective communication also plays a crucial role, as it ensures that ideas are clearly understood and collaboratively refined.
In conclusion, problem-solving is an indispensable skill set that blends analytical thinking, creativity, and practical implementation. It’s a journey from understanding the problem to applying a solution and learning from the outcome.
Whether dealing with simple or complex issues, or structured or unstructured challenges, the essence of problem-solving lies in a methodical approach and the effective use of various tools and techniques. It’s a skill that is honed over time, through experience, reflection, and the continuous development of critical thinking, creativity, and communication abilities. In mastering problem-solving, one not only addresses immediate issues but also builds a foundation for future challenges, leading to more innovative and effective outcomes.
- Mourtos, N.J., Okamoto, N.D. and Rhee, J., 2004, February. Defining, teaching, and assessing problem solving skills . In 7th UICEE Annual Conference on Engineering Education (pp. 1-5).
- Foshay, R. and Kirkley, J., 2003. Principles for teaching problem solving. Technical paper , 4 (1), pp.1-16.
Q: What are the key steps in the problem-solving process?
A : The problem-solving process involves several key steps: identifying the problem, defining it clearly, analyzing it to understand its root causes, generating a range of potential solutions, evaluating and selecting the most viable solution, implementing the chosen solution, and finally, reviewing and reflecting on the effectiveness of the solution and the process used to arrive at it.
Q: How can brainstorming be effectively used in problem-solving?
A: Brainstorming is effective in the solution generation phase of problem-solving. It involves gathering a group and encouraging the free flow of ideas without immediate criticism. The goal is to produce a large quantity of ideas, fostering creative thinking. This technique helps in uncovering unique and innovative solutions that might not surface in a more structured setting.
Q: What is SWOT Analysis and how does it aid in problem-solving?
A : SWOT Analysis is a strategic planning tool used to evaluate the Strengths, Weaknesses, Opportunities, and Threats involved in a situation. In problem-solving, it aids by providing a clear understanding of the internal and external factors that could impact the problem and potential solutions. This analysis helps in formulating strategies that leverage strengths and opportunities while mitigating weaknesses and threats.
Q: Why is it important to understand the nature of a problem before solving it?
A : Understanding the nature of a problem is crucial as it dictates the approach for solving it. Problems can be simple or complex, structured or unstructured, and each type requires a different strategy. A clear understanding of the problem’s nature helps in applying the appropriate methods and tools for effective resolution.
Q: How does reflection contribute to developing problem-solving skills?
A : Reflection is a critical component in developing problem-solving skills. It involves looking back at the problem-solving process and the implemented solution to assess what worked well and what didn’t. Reflecting on both successes and failures provides valuable insights and lessons, helping to refine and improve problem-solving strategies for future challenges. This reflective practice enhances one’s ability to approach problems more effectively over time.

Daniel Croft
Hi im Daniel continuous improvement manager with a Black Belt in Lean Six Sigma and over 10 years of real-world experience across a range sectors, I have a passion for optimizing processes and creating a culture of efficiency. I wanted to create Learn Lean Siigma to be a platform dedicated to Lean Six Sigma and process improvement insights and provide all the guides, tools, techniques and templates I looked for in one place as someone new to the world of Lean Six Sigma and Continuous improvement.

Free Lean Six Sigma Templates
Improve your Lean Six Sigma projects with our free templates. They're designed to make implementation and management easier, helping you achieve better results.
Was this helpful?
How to master the seven-step problem-solving process
In this episode of the McKinsey Podcast , Simon London speaks with Charles Conn, CEO of venture-capital firm Oxford Sciences Innovation, and McKinsey senior partner Hugo Sarrazin about the complexities of different problem-solving strategies.
Podcast transcript
Simon London: Hello, and welcome to this episode of the McKinsey Podcast , with me, Simon London. What’s the number-one skill you need to succeed professionally? Salesmanship, perhaps? Or a facility with statistics? Or maybe the ability to communicate crisply and clearly? Many would argue that at the very top of the list comes problem solving: that is, the ability to think through and come up with an optimal course of action to address any complex challenge—in business, in public policy, or indeed in life.
Looked at this way, it’s no surprise that McKinsey takes problem solving very seriously, testing for it during the recruiting process and then honing it, in McKinsey consultants, through immersion in a structured seven-step method. To discuss the art of problem solving, I sat down in California with McKinsey senior partner Hugo Sarrazin and also with Charles Conn. Charles is a former McKinsey partner, entrepreneur, executive, and coauthor of the book Bulletproof Problem Solving: The One Skill That Changes Everything [John Wiley & Sons, 2018].
Charles and Hugo, welcome to the podcast. Thank you for being here.
Hugo Sarrazin: Our pleasure.
Charles Conn: It’s terrific to be here.
Simon London: Problem solving is a really interesting piece of terminology. It could mean so many different things. I have a son who’s a teenage climber. They talk about solving problems. Climbing is problem solving. Charles, when you talk about problem solving, what are you talking about?
Charles Conn: For me, problem solving is the answer to the question “What should I do?” It’s interesting when there’s uncertainty and complexity, and when it’s meaningful because there are consequences. Your son’s climbing is a perfect example. There are consequences, and it’s complicated, and there’s uncertainty—can he make that grab? I think we can apply that same frame almost at any level. You can think about questions like “What town would I like to live in?” or “Should I put solar panels on my roof?”
You might think that’s a funny thing to apply problem solving to, but in my mind it’s not fundamentally different from business problem solving, which answers the question “What should my strategy be?” Or problem solving at the policy level: “How do we combat climate change?” “Should I support the local school bond?” I think these are all part and parcel of the same type of question, “What should I do?”
I’m a big fan of structured problem solving. By following steps, we can more clearly understand what problem it is we’re solving, what are the components of the problem that we’re solving, which components are the most important ones for us to pay attention to, which analytic techniques we should apply to those, and how we can synthesize what we’ve learned back into a compelling story. That’s all it is, at its heart.
I think sometimes when people think about seven steps, they assume that there’s a rigidity to this. That’s not it at all. It’s actually to give you the scope for creativity, which often doesn’t exist when your problem solving is muddled.
Simon London: You were just talking about the seven-step process. That’s what’s written down in the book, but it’s a very McKinsey process as well. Without getting too deep into the weeds, let’s go through the steps, one by one. You were just talking about problem definition as being a particularly important thing to get right first. That’s the first step. Hugo, tell us about that.
Hugo Sarrazin: It is surprising how often people jump past this step and make a bunch of assumptions. The most powerful thing is to step back and ask the basic questions—“What are we trying to solve? What are the constraints that exist? What are the dependencies?” Let’s make those explicit and really push the thinking and defining. At McKinsey, we spend an enormous amount of time in writing that little statement, and the statement, if you’re a logic purist, is great. You debate. “Is it an ‘or’? Is it an ‘and’? What’s the action verb?” Because all these specific words help you get to the heart of what matters.
Want to subscribe to The McKinsey Podcast ?
Simon London: So this is a concise problem statement.
Hugo Sarrazin: Yeah. It’s not like “Can we grow in Japan?” That’s interesting, but it is “What, specifically, are we trying to uncover in the growth of a product in Japan? Or a segment in Japan? Or a channel in Japan?” When you spend an enormous amount of time, in the first meeting of the different stakeholders, debating this and having different people put forward what they think the problem definition is, you realize that people have completely different views of why they’re here. That, to me, is the most important step.
Charles Conn: I would agree with that. For me, the problem context is critical. When we understand “What are the forces acting upon your decision maker? How quickly is the answer needed? With what precision is the answer needed? Are there areas that are off limits or areas where we would particularly like to find our solution? Is the decision maker open to exploring other areas?” then you not only become more efficient, and move toward what we call the critical path in problem solving, but you also make it so much more likely that you’re not going to waste your time or your decision maker’s time.
How often do especially bright young people run off with half of the idea about what the problem is and start collecting data and start building models—only to discover that they’ve really gone off half-cocked.
Hugo Sarrazin: Yeah.
Charles Conn: And in the wrong direction.
Simon London: OK. So step one—and there is a real art and a structure to it—is define the problem. Step two, Charles?
Charles Conn: My favorite step is step two, which is to use logic trees to disaggregate the problem. Every problem we’re solving has some complexity and some uncertainty in it. The only way that we can really get our team working on the problem is to take the problem apart into logical pieces.
What we find, of course, is that the way to disaggregate the problem often gives you an insight into the answer to the problem quite quickly. I love to do two or three different cuts at it, each one giving a bit of a different insight into what might be going wrong. By doing sensible disaggregations, using logic trees, we can figure out which parts of the problem we should be looking at, and we can assign those different parts to team members.
Simon London: What’s a good example of a logic tree on a sort of ratable problem?
Charles Conn: Maybe the easiest one is the classic profit tree. Almost in every business that I would take a look at, I would start with a profit or return-on-assets tree. In its simplest form, you have the components of revenue, which are price and quantity, and the components of cost, which are cost and quantity. Each of those can be broken out. Cost can be broken into variable cost and fixed cost. The components of price can be broken into what your pricing scheme is. That simple tree often provides insight into what’s going on in a business or what the difference is between that business and the competitors.
If we add the leg, which is “What’s the asset base or investment element?”—so profit divided by assets—then we can ask the question “Is the business using its investments sensibly?” whether that’s in stores or in manufacturing or in transportation assets. I hope we can see just how simple this is, even though we’re describing it in words.
When I went to work with Gordon Moore at the Moore Foundation, the problem that he asked us to look at was “How can we save Pacific salmon?” Now, that sounds like an impossible question, but it was amenable to precisely the same type of disaggregation and allowed us to organize what became a 15-year effort to improve the likelihood of good outcomes for Pacific salmon.
Simon London: Now, is there a danger that your logic tree can be impossibly large? This, I think, brings us onto the third step in the process, which is that you have to prioritize.
Charles Conn: Absolutely. The third step, which we also emphasize, along with good problem definition, is rigorous prioritization—we ask the questions “How important is this lever or this branch of the tree in the overall outcome that we seek to achieve? How much can I move that lever?” Obviously, we try and focus our efforts on ones that have a big impact on the problem and the ones that we have the ability to change. With salmon, ocean conditions turned out to be a big lever, but not one that we could adjust. We focused our attention on fish habitats and fish-harvesting practices, which were big levers that we could affect.
People spend a lot of time arguing about branches that are either not important or that none of us can change. We see it in the public square. When we deal with questions at the policy level—“Should you support the death penalty?” “How do we affect climate change?” “How can we uncover the causes and address homelessness?”—it’s even more important that we’re focusing on levers that are big and movable.
Would you like to learn more about our Strategy & Corporate Finance Practice ?
Simon London: Let’s move swiftly on to step four. You’ve defined your problem, you disaggregate it, you prioritize where you want to analyze—what you want to really look at hard. Then you got to the work plan. Now, what does that mean in practice?
Hugo Sarrazin: Depending on what you’ve prioritized, there are many things you could do. It could be breaking the work among the team members so that people have a clear piece of the work to do. It could be defining the specific analyses that need to get done and executed, and being clear on time lines. There’s always a level-one answer, there’s a level-two answer, there’s a level-three answer. Without being too flippant, I can solve any problem during a good dinner with wine. It won’t have a whole lot of backing.
Simon London: Not going to have a lot of depth to it.
Hugo Sarrazin: No, but it may be useful as a starting point. If the stakes are not that high, that could be OK. If it’s really high stakes, you may need level three and have the whole model validated in three different ways. You need to find a work plan that reflects the level of precision, the time frame you have, and the stakeholders you need to bring along in the exercise.
Charles Conn: I love the way you’ve described that, because, again, some people think of problem solving as a linear thing, but of course what’s critical is that it’s iterative. As you say, you can solve the problem in one day or even one hour.
Charles Conn: We encourage our teams everywhere to do that. We call it the one-day answer or the one-hour answer. In work planning, we’re always iterating. Every time you see a 50-page work plan that stretches out to three months, you know it’s wrong. It will be outmoded very quickly by that learning process that you described. Iterative problem solving is a critical part of this. Sometimes, people think work planning sounds dull, but it isn’t. It’s how we know what’s expected of us and when we need to deliver it and how we’re progressing toward the answer. It’s also the place where we can deal with biases. Bias is a feature of every human decision-making process. If we design our team interactions intelligently, we can avoid the worst sort of biases.
Simon London: Here we’re talking about cognitive biases primarily, right? It’s not that I’m biased against you because of your accent or something. These are the cognitive biases that behavioral sciences have shown we all carry around, things like anchoring, overoptimism—these kinds of things.
Both: Yeah.
Charles Conn: Availability bias is the one that I’m always alert to. You think you’ve seen the problem before, and therefore what’s available is your previous conception of it—and we have to be most careful about that. In any human setting, we also have to be careful about biases that are based on hierarchies, sometimes called sunflower bias. I’m sure, Hugo, with your teams, you make sure that the youngest team members speak first. Not the oldest team members, because it’s easy for people to look at who’s senior and alter their own creative approaches.
Hugo Sarrazin: It’s helpful, at that moment—if someone is asserting a point of view—to ask the question “This was true in what context?” You’re trying to apply something that worked in one context to a different one. That can be deadly if the context has changed, and that’s why organizations struggle to change. You promote all these people because they did something that worked well in the past, and then there’s a disruption in the industry, and they keep doing what got them promoted even though the context has changed.
Simon London: Right. Right.
Hugo Sarrazin: So it’s the same thing in problem solving.
Charles Conn: And it’s why diversity in our teams is so important. It’s one of the best things about the world that we’re in now. We’re likely to have people from different socioeconomic, ethnic, and national backgrounds, each of whom sees problems from a slightly different perspective. It is therefore much more likely that the team will uncover a truly creative and clever approach to problem solving.
Simon London: Let’s move on to step five. You’ve done your work plan. Now you’ve actually got to do the analysis. The thing that strikes me here is that the range of tools that we have at our disposal now, of course, is just huge, particularly with advances in computation, advanced analytics. There’s so many things that you can apply here. Just talk about the analysis stage. How do you pick the right tools?
Charles Conn: For me, the most important thing is that we start with simple heuristics and explanatory statistics before we go off and use the big-gun tools. We need to understand the shape and scope of our problem before we start applying these massive and complex analytical approaches.
Simon London: Would you agree with that?
Hugo Sarrazin: I agree. I think there are so many wonderful heuristics. You need to start there before you go deep into the modeling exercise. There’s an interesting dynamic that’s happening, though. In some cases, for some types of problems, it is even better to set yourself up to maximize your learning. Your problem-solving methodology is test and learn, test and learn, test and learn, and iterate. That is a heuristic in itself, the A/B testing that is used in many parts of the world. So that’s a problem-solving methodology. It’s nothing different. It just uses technology and feedback loops in a fast way. The other one is exploratory data analysis. When you’re dealing with a large-scale problem, and there’s so much data, I can get to the heuristics that Charles was talking about through very clever visualization of data.
You test with your data. You need to set up an environment to do so, but don’t get caught up in neural-network modeling immediately. You’re testing, you’re checking—“Is the data right? Is it sound? Does it make sense?”—before you launch too far.
Simon London: You do hear these ideas—that if you have a big enough data set and enough algorithms, they’re going to find things that you just wouldn’t have spotted, find solutions that maybe you wouldn’t have thought of. Does machine learning sort of revolutionize the problem-solving process? Or are these actually just other tools in the toolbox for structured problem solving?
Charles Conn: It can be revolutionary. There are some areas in which the pattern recognition of large data sets and good algorithms can help us see things that we otherwise couldn’t see. But I do think it’s terribly important we don’t think that this particular technique is a substitute for superb problem solving, starting with good problem definition. Many people use machine learning without understanding algorithms that themselves can have biases built into them. Just as 20 years ago, when we were doing statistical analysis, we knew that we needed good model definition, we still need a good understanding of our algorithms and really good problem definition before we launch off into big data sets and unknown algorithms.
Simon London: Step six. You’ve done your analysis.
Charles Conn: I take six and seven together, and this is the place where young problem solvers often make a mistake. They’ve got their analysis, and they assume that’s the answer, and of course it isn’t the answer. The ability to synthesize the pieces that came out of the analysis and begin to weave those into a story that helps people answer the question “What should I do?” This is back to where we started. If we can’t synthesize, and we can’t tell a story, then our decision maker can’t find the answer to “What should I do?”
Simon London: But, again, these final steps are about motivating people to action, right?
Charles Conn: Yeah.
Simon London: I am slightly torn about the nomenclature of problem solving because it’s on paper, right? Until you motivate people to action, you actually haven’t solved anything.
Charles Conn: I love this question because I think decision-making theory, without a bias to action, is a waste of time. Everything in how I approach this is to help people take action that makes the world better.
Simon London: Hence, these are absolutely critical steps. If you don’t do this well, you’ve just got a bunch of analysis.
Charles Conn: We end up in exactly the same place where we started, which is people speaking across each other, past each other in the public square, rather than actually working together, shoulder to shoulder, to crack these important problems.
Simon London: In the real world, we have a lot of uncertainty—arguably, increasing uncertainty. How do good problem solvers deal with that?
Hugo Sarrazin: At every step of the process. In the problem definition, when you’re defining the context, you need to understand those sources of uncertainty and whether they’re important or not important. It becomes important in the definition of the tree.
You need to think carefully about the branches of the tree that are more certain and less certain as you define them. They don’t have equal weight just because they’ve got equal space on the page. Then, when you’re prioritizing, your prioritization approach may put more emphasis on things that have low probability but huge impact—or, vice versa, may put a lot of priority on things that are very likely and, hopefully, have a reasonable impact. You can introduce that along the way. When you come back to the synthesis, you just need to be nuanced about what you’re understanding, the likelihood.
Often, people lack humility in the way they make their recommendations: “This is the answer.” They’re very precise, and I think we would all be well-served to say, “This is a likely answer under the following sets of conditions” and then make the level of uncertainty clearer, if that is appropriate. It doesn’t mean you’re always in the gray zone; it doesn’t mean you don’t have a point of view. It just means that you can be explicit about the certainty of your answer when you make that recommendation.
Simon London: So it sounds like there is an underlying principle: “Acknowledge and embrace the uncertainty. Don’t pretend that it isn’t there. Be very clear about what the uncertainties are up front, and then build that into every step of the process.”
Hugo Sarrazin: Every step of the process.
Simon London: Yeah. We have just walked through a particular structured methodology for problem solving. But, of course, this is not the only structured methodology for problem solving. One that is also very well-known is design thinking, which comes at things very differently. So, Hugo, I know you have worked with a lot of designers. Just give us a very quick summary. Design thinking—what is it, and how does it relate?
Hugo Sarrazin: It starts with an incredible amount of empathy for the user and uses that to define the problem. It does pause and go out in the wild and spend an enormous amount of time seeing how people interact with objects, seeing the experience they’re getting, seeing the pain points or joy—and uses that to infer and define the problem.
Simon London: Problem definition, but out in the world.
Hugo Sarrazin: With an enormous amount of empathy. There’s a huge emphasis on empathy. Traditional, more classic problem solving is you define the problem based on an understanding of the situation. This one almost presupposes that we don’t know the problem until we go see it. The second thing is you need to come up with multiple scenarios or answers or ideas or concepts, and there’s a lot of divergent thinking initially. That’s slightly different, versus the prioritization, but not for long. Eventually, you need to kind of say, “OK, I’m going to converge again.” Then you go and you bring things back to the customer and get feedback and iterate. Then you rinse and repeat, rinse and repeat. There’s a lot of tactile building, along the way, of prototypes and things like that. It’s very iterative.
Simon London: So, Charles, are these complements or are these alternatives?
Charles Conn: I think they’re entirely complementary, and I think Hugo’s description is perfect. When we do problem definition well in classic problem solving, we are demonstrating the kind of empathy, at the very beginning of our problem, that design thinking asks us to approach. When we ideate—and that’s very similar to the disaggregation, prioritization, and work-planning steps—we do precisely the same thing, and often we use contrasting teams, so that we do have divergent thinking. The best teams allow divergent thinking to bump them off whatever their initial biases in problem solving are. For me, design thinking gives us a constant reminder of creativity, empathy, and the tactile nature of problem solving, but it’s absolutely complementary, not alternative.
Simon London: I think, in a world of cross-functional teams, an interesting question is do people with design-thinking backgrounds really work well together with classical problem solvers? How do you make that chemistry happen?
Hugo Sarrazin: Yeah, it is not easy when people have spent an enormous amount of time seeped in design thinking or user-centric design, whichever word you want to use. If the person who’s applying classic problem-solving methodology is very rigid and mechanical in the way they’re doing it, there could be an enormous amount of tension. If there’s not clarity in the role and not clarity in the process, I think having the two together can be, sometimes, problematic.
The second thing that happens often is that the artifacts the two methodologies try to gravitate toward can be different. Classic problem solving often gravitates toward a model; design thinking migrates toward a prototype. Rather than writing a big deck with all my supporting evidence, they’ll bring an example, a thing, and that feels different. Then you spend your time differently to achieve those two end products, so that’s another source of friction.
Now, I still think it can be an incredibly powerful thing to have the two—if there are the right people with the right mind-set, if there is a team that is explicit about the roles, if we’re clear about the kind of outcomes we are attempting to bring forward. There’s an enormous amount of collaborativeness and respect.
Simon London: But they have to respect each other’s methodology and be prepared to flex, maybe, a little bit, in how this process is going to work.
Hugo Sarrazin: Absolutely.
Simon London: The other area where, it strikes me, there could be a little bit of a different sort of friction is this whole concept of the day-one answer, which is what we were just talking about in classical problem solving. Now, you know that this is probably not going to be your final answer, but that’s how you begin to structure the problem. Whereas I would imagine your design thinkers—no, they’re going off to do their ethnographic research and get out into the field, potentially for a long time, before they come back with at least an initial hypothesis.

Want better strategies? Become a bulletproof problem solver
Hugo Sarrazin: That is a great callout, and that’s another difference. Designers typically will like to soak into the situation and avoid converging too quickly. There’s optionality and exploring different options. There’s a strong belief that keeps the solution space wide enough that you can come up with more radical ideas. If there’s a large design team or many designers on the team, and you come on Friday and say, “What’s our week-one answer?” they’re going to struggle. They’re not going to be comfortable, naturally, to give that answer. It doesn’t mean they don’t have an answer; it’s just not where they are in their thinking process.
Simon London: I think we are, sadly, out of time for today. But Charles and Hugo, thank you so much.
Charles Conn: It was a pleasure to be here, Simon.
Hugo Sarrazin: It was a pleasure. Thank you.
Simon London: And thanks, as always, to you, our listeners, for tuning into this episode of the McKinsey Podcast . If you want to learn more about problem solving, you can find the book, Bulletproof Problem Solving: The One Skill That Changes Everything , online or order it through your local bookstore. To learn more about McKinsey, you can of course find us at McKinsey.com.
Charles Conn is CEO of Oxford Sciences Innovation and an alumnus of McKinsey’s Sydney office. Hugo Sarrazin is a senior partner in the Silicon Valley office, where Simon London, a member of McKinsey Publishing, is also based.
Explore a career with us
Related articles.

Strategy to beat the odds

Five routes to more innovative problem solving

Problem Solving Skills for the Digital Age
Lucid Content
Reading time: about 6 min
Let’s face it: Things don’t always go according to plan. Systems fail, wires get crossed, projects fall apart.
Problems are an inevitable part of life and work. They’re also an opportunity to think critically and find solutions. But knowing how to get to the root of unexpected situations or challenges can mean the difference between moving forward and spinning your wheels.
Here, we’ll break down the key elements of problem solving, some effective problem solving approaches, and a few effective tools to help you arrive at solutions more quickly.
So, what is problem solving?
Broadly defined, problem solving is the process of finding solutions to difficult or complex issues. But you already knew that. Understanding problem solving frameworks, however, requires a deeper dive.
Think about a recent problem you faced. Maybe it was an interpersonal issue. Or it could have been a major creative challenge you needed to solve for a client at work. How did you feel as you approached the issue? Stressed? Confused? Optimistic? Most importantly, which problem solving techniques did you use to tackle the situation head-on? How did you organize thoughts to arrive at the best possible solution?
Solve your problem-solving problem
Here’s the good news: Good problem solving skills can be learned. By its nature, problem solving doesn’t adhere to a clear set of do’s and don’ts—it requires flexibility, communication, and adaptation. However, most problems you face, at work or in life, can be tackled using four basic steps.
First, you must define the problem . This step sounds obvious, but often, you can notice that something is amiss in a project or process without really knowing where the core problem lies. The most challenging part of the problem solving process is uncovering where the problem originated.
Second, you work to generate alternatives to address the problem directly. This should be a collaborative process to ensure you’re considering every angle of the issue.
Third, you evaluate and test potential solutions to your problem. This step helps you fully understand the complexity of the issue and arrive at the best possible solution.
Finally, fourth, you select and implement the solution that best addresses the problem.
Following this basic four-step process will help you approach every problem you encounter with the same rigorous critical and strategic thinking process, recognize commonalities in new problems, and avoid repeating past mistakes.
In addition to these basic problem solving skills, there are several best practices that you should incorporate. These problem solving approaches can help you think more critically and creatively about any problem:
You may not feel like you have the right expertise to resolve a specific problem. Don’t let that stop you from tackling it. The best problem solvers become students of the problem at hand. Even if you don’t have particular expertise on a topic, your unique experience and perspective can lend itself to creative solutions.
Challenge the status quo
Standard problem solving methodologies and problem solving frameworks are a good starting point. But don’t be afraid to challenge assumptions and push boundaries. Good problem solvers find ways to apply existing best practices into innovative problem solving approaches.
Think broadly about and visualize the issue
Sometimes it’s hard to see a problem, even if it’s right in front of you. Clear answers could be buried in rows of spreadsheet data or lost in miscommunication. Use visualization as a problem solving tool to break down problems to their core elements. Visuals can help you see bottlenecks in the context of the whole process and more clearly organize your thoughts as you define the problem.
Hypothesize, test, and try again
It might be cliche, but there’s truth in the old adage that 99% of inspiration is perspiration. The best problem solvers ask why, test, fail, and ask why again. Whether it takes one or 1,000 iterations to solve a problem, the important part—and the part that everyone remembers—is the solution.
Consider other viewpoints
Today’s problems are more complex, more difficult to solve, and they often involve multiple disciplines. They require group expertise and knowledge. Being open to others’ expertise increases your ability to be a great problem solver. Great solutions come from integrating your ideas with those of others to find a better solution. Excellent problem solvers build networks and know how to collaborate with other people and teams. They are skilled in bringing people together and sharing knowledge and information.
4 effective problem solving tools
As you work through the problem solving steps, try these tools to better define the issue and find the appropriate solution.
Root cause analysis
Similar to pulling weeds from your garden, if you don’t get to the root of the problem, it’s bound to come back. A root cause analysis helps you figure out the root cause behind any disruption or problem, so you can take steps to correct the problem from recurring. The root cause analysis process involves defining the problem, collecting data, and identifying causal factors to pinpoint root causes and arrive at a solution.

Less structured than other more traditional problem solving methods, the 5 Whys is simply what it sounds like: asking why over and over to get to the root of an obstacle or setback. This technique encourages an open dialogue that can trigger new ideas about a problem, whether done individually or with a group. Each why piggybacks off the answer to the previous why. Get started with the template below—both flowcharts and fishbone diagrams can also help you track your answers to the 5 Whys.

Brainstorming
A meeting of the minds, a brain dump, a mind meld, a jam session. Whatever you call it, collaborative brainstorming can help surface previously unseen issues, root causes, and alternative solutions. Create and share a mind map with your team members to fuel your brainstorming session.
Gap analysis
Sometimes you don’t know where the problem is until you determine where it isn’t. Gap filling helps you analyze inadequacies that are preventing you from reaching an optimized state or end goal. For example, a content gap analysis can help a content marketer determine where holes exist in messaging or the customer experience. Gap analysis is especially helpful when it comes to problem solving because it requires you to find workable solutions. A SWOT analysis chart that looks at a problem through the lens of strengths, opportunities, opportunities, and threats can be a helpful problem solving framework as you start your analysis.

A better way to problem solve
Beyond these practical tips and tools, there are myriad methodical and creative approaches to move a project forward or resolve a conflict. The right approach will depend on the scope of the issue and your desired outcome.
Depending on the problem, Lucidchart offers several templates and diagrams that could help you identify the cause of the issue and map out a plan to resolve it. Learn more about how Lucidchart can help you take control of your problem solving process .
About Lucidchart
Lucidchart, a cloud-based intelligent diagramming application, is a core component of Lucid Software's Visual Collaboration Suite. This intuitive, cloud-based solution empowers teams to collaborate in real-time to build flowcharts, mockups, UML diagrams, customer journey maps, and more. Lucidchart propels teams forward to build the future faster. Lucid is proud to serve top businesses around the world, including customers such as Google, GE, and NBC Universal, and 99% of the Fortune 500. Lucid partners with industry leaders, including Google, Atlassian, and Microsoft. Since its founding, Lucid has received numerous awards for its products, business, and workplace culture. For more information, visit lucidchart.com.
Related articles
How you can use creative problem solving at work.
Sometimes you're faced with challenges that traditional problem solving can't fix. Creative problem solving encourages you to find new, creative ways of thinking that can help you overcome the issue at hand more quickly.
Solve issues faster with the root cause analysis process
Root cause analysis refers to any problem-solving method used to trace an issue back to its origin. Learn how to complete a root cause analysis—we've even included templates to get you started.
Bring your bright ideas to life.
or continue with
By registering, you agree to our Terms of Service and you acknowledge that you have read and understand our Privacy Policy .
Learn Creative Problem Solving Techniques to Stimulate Innovation in Your Organization
By Kate Eby | October 20, 2017 (updated August 27, 2021)
- Share on Facebook
- Share on LinkedIn
Link copied
In today’s competitive business landscape, organizations need processes in place to make strong, well-informed, and innovative decisions. Problem solving - in particular creative problem solving (CPS) - is a key skill in learning how to accurately identify problems and their causes, generate potential solutions, and evaluate all the possibilities to arrive at a strong corrective course of action. Every team in any organization, regardless of department or industry, needs to be effective, creative, and quick when solving problems.
In this article, we’ll discuss traditional and creative problem solving, and define the steps, best practices, and common barriers associated. After that, we’ll provide helpful methods and tools to identify the cause(s) of problematic situations, so you can get to the root of the issue and start to generate solutions. Then, we offer nearly 20 creative problem solving techniques to implement at your organization, or even in your personal life. Along the way, experts weigh in on the importance of problem solving, and offer tips and tricks.
What Is Problem Solving and Decision Making?
Problem solving is the process of working through every aspect of an issue or challenge to reach a solution. Decision making is choosing one of multiple proposed solutions — therefore, this process also includes defining and evaluating all potential options. Decision making is often one step of the problem solving process, but the two concepts are distinct.
Collective problem solving is problem solving that includes many different parties and bridges the knowledge of different groups. Collective problem solving is common in business problem solving because workplace decisions typically affect more than one person.
Problem solving, especially in business, is a complicated science. Not only are business conflicts multifaceted, but they often involve different personalities, levels of authority, and group dynamics. In recent years, however, there has been a rise in psychology-driven problem solving techniques, especially for the workplace. In fact, the psychology of how people solve problems is now studied formally in academic disciplines such as psychology and cognitive science.

Joe Carella is the Assistant Dean for Executive Education at the University of Arizona . Joe has over 20 years of experience in helping executives and corporations in managing change and developing successful business strategies. His doctoral research and executive education engagements have seen him focus on corporate strategy, decision making and business performance with a variety of corporate clients including Hershey’s, Chevron, Fender Musical Instruments Corporation, Intel, DP World, Essilor, BBVA Compass Bank.
He explains some of the basic psychology behind problem solving: “When our brain is engaged in the process of solving problems, it is engaged in a series of steps where it processes and organizes the information it receives while developing new knowledge it uses in future steps. Creativity is embedded in this process by incorporating diverse inputs and/or new ways of organizing the information received.”

Laura MacLeod is a Professor of Social Group Work at City University of New York, and the creator of From The Inside Out Project® , a program that coaches managers in team leadership for a variety of workplaces. She has a background in social work and over two decades of experience as a union worker, and currently leads talks on conflict resolution, problem solving, and listening skills at conferences across the country.
MacLeod thinks of problem solving as an integral practice of successful organizations. “Problem solving is a collaborative process — all voices are heard and connected, and resolution is reached by the group,” she says. “Problems and conflicts occur in all groups and teams in the workplace, but if leaders involve everyone in working through, they will foster cohesion, engagement, and buy in. Everybody wins.”
10 tips that will make you more productive.

Uncover the top three factors that are killing your productivity and 10 tips to help you overcome them.
Download the free e-book to overcome my productivity killers
Project Management Guide
Your one-stop shop for everything project management

Ready to get more out of your project management efforts? Visit our comprehensive project management guide for tips, best practices, and free resources to manage your work more effectively.
View the guide
What Is the First Step in Solving a Problem?
Although problem solving techniques vary procedurally, experts agree that the first step in solving a problem is defining the problem. Without a clear articulation of the problem at stake, it is impossible to analyze all the key factors and actors, generate possible solutions, and then evaluate them to pick the best option.

Dr. Elliott Jaffa is a behavioral and management psychologist with over 25 years of problem solving training and management experience. “Start with defining the problem you want to solve,” he says, “And then define where you want to be, what you want to come away with.” He emphasizes these are the first steps in creating an actionable, clear solution.

Bryan Mattimore is Co-Founder of Growth Engine, an 18-year old innovation agency based in Norwalk, CT. Bryan has facilitated over 1,000 ideation sessions and managed over 200 successful innovation projects leading to over $3 billion in new sales. His newest book is 21 Days to a Big Idea . When asked about the first critical component to successful problem solving, Mattimore says, “Defining the challenge correctly, or ‘solving the right problem’ … The three creative techniques we use to help our clients ‘identify the right problem to be solved’ are questioning assumptions, 20 questions, and problem redefinition. A good example of this was a new product challenge from a client to help them ‘invent a new iron. We got them to redefine the challenge as first: a) inventing new anti-wrinkle devices, and then b) inventing new garment care devices.”
What Are Problem Solving Skills?
To understand the necessary skills in problem solving, you should first understand the types of thinking often associated with strong decision making. Most problem solving techniques look for a balance between the following binaries:
- Convergent vs. Divergent Thinking: Convergent thinking is bringing together disparate information or ideas to determine a single best answer or solution. This thinking style values logic, speed, and accuracy, and leaves no chance for ambiguity. Divergent thinking is focused on generating new ideas to identify and evaluate multiple possible solutions, often uniting ideas in unexpected combinations. Divergent thinking is characterized by creativity, complexity, curiosity, flexibility, originality, and risk-taking.
- Pragmatics vs. Semantics: Pragmatics refer to the logic of the problem at hand, and semantics is how you interpret the problem to solve it. Both are important to yield the best possible solution.
- Mathematical vs. Personal Problem Solving: Mathematical problem solving involves logic (usually leading to a single correct answer), and is useful for problems that involve numbers or require an objective, clear-cut solution. However, many workplace problems also require personal problem solving, which includes interpersonal, collaborative, and emotional intuition and skills.
The following basic methods are fundamental problem solving concepts. Implement them to help balance the above thinking models.
- Reproductive Thinking: Reproductive thinking uses past experience to solve a problem. However, be careful not to rely too heavily on past solutions, and to evaluate current problems individually, with their own factors and parameters.
- Idea Generation: The process of generating many possible courses of action to identify a solution. This is most commonly a team exercise because putting everyone’s ideas on the table will yield the greatest number of potential solutions.
However, many of the most critical problem solving skills are “soft” skills: personal and interpersonal understanding, intuitiveness, and strong listening.
Mattimore expands on this idea: “The seven key skills to be an effective creative problem solver that I detail in my book Idea Stormers: How to Lead and Inspire Creative Breakthroughs are: 1) curiosity 2) openness 3) a willingness to embrace ambiguity 4) the ability to identify and transfer principles across categories and disciplines 5) the desire to search for integrity in ideas, 6) the ability to trust and exercise “knowingness” and 7) the ability to envision new worlds (think Dr. Seuss, Star Wars, Hunger Games, Harry Potter, etc.).”
“As an individual contributor to problem solving it is important to exercise our curiosity, questioning, and visioning abilities,” advises Carella. “As a facilitator it is essential to allow for diverse ideas to emerge, be able to synthesize and ‘translate’ other people’s thinking, and build an extensive network of available resources.”
MacLeod says the following interpersonal skills are necessary to effectively facilitate group problem solving: “The abilities to invite participation (hear all voices, encourage silent members), not take sides, manage dynamics between the monopolizer, the scapegoat, and the bully, and deal with conflict (not avoiding it or shutting down).”
Furthermore, Jaffa explains that the skills of a strong problem solver aren’t measurable. The best way to become a creative problem solver, he says, is to do regular creative exercises that keep you sharp and force you to think outside the box. Carella echoes this sentiment: “Neuroscience tells us that creativity comes from creating novel neural paths. Allow a few minutes each day to exercise your brain with novel techniques and brain ‘tricks’ – read something new, drive to work via a different route, count backwards, smell a new fragrance, etc.”
What Is Creative Problem Solving? History, Evolution, and Core Principles
Creative problem solving (CPS) is a method of problem solving in which you approach a problem or challenge in an imaginative, innovative way. The goal of CPS is to come up with innovative solutions, make a decision, and take action quickly. Sidney Parnes and Alex Osborn are credited with developing the creative problem solving process in the 1950s. The concept was further studied and developed at SUNY Buffalo State and the Creative Education Foundation.
The core principles of CPS include the following:
- Balance divergent and convergent thinking
- Ask problems as questions
- Defer or suspend judgement
- Focus on “Yes, and…” rather than “No, but…”
According to Carella, “Creative problem solving is the mental process used for generating innovative and imaginative ideas as a solution to a problem or a challenge. Creative problem solving techniques can be pursued by individuals or groups.”
When asked to define CPS, Jaffa explains that it is, by nature, difficult to create boundaries for. “Creative problem solving is not cut and dry,” he says, “If you ask 100 different people the definition of creative problem solving, you’ll get 100 different responses - it’s a non-entity.”
Business presents a unique need for creative problem solving. Especially in today’s competitive landscape, organizations need to iterate quickly, innovate with intention, and constantly be at the cutting-edge of creativity and new ideas to succeed. Developing CPS skills among your workforce not only enables you to make faster, stronger in-the-moment decisions, but also inspires a culture of collaborative work and knowledge sharing. When people work together to generate multiple novel ideas and evaluate solutions, they are also more likely to arrive at an effective decision, which will improve business processes and reduce waste over time. In fact, CPS is so important that some companies now list creative problem solving skills as a job criteria.
MacLeod reiterates the vitality of creative problem solving in the workplace. “Problem solving is crucial for all groups and teams,” she says. “Leaders need to know how to guide the process, hear all voices and involve all members - it’s not easy.”
“This mental process [of CPS] is especially helpful in work environments where individuals and teams continuously struggle with new problems and challenges posed by their continuously changing environment,” adds Carella.
Problem Solving Best Practices
By nature, creative problem solving does not have a clear-cut set of do’s and don’ts. Rather, creating a culture of strong creative problem solvers requires flexibility, adaptation, and interpersonal skills. However, there are a several best practices that you should incorporate:
- Use a Systematic Approach: Regardless of the technique you use, choose a systematic method that satisfies your workplace conditions and constraints (time, resources, budget, etc.). Although you want to preserve creativity and openness to new ideas, maintaining a structured approach to the process will help you stay organized and focused.
- View Problems as Opportunities: Rather than focusing on the negatives or giving up when you encounter barriers, treat problems as opportunities to enact positive change on the situation. In fact, some experts even recommend defining problems as opportunities, to remain proactive and positive.
- Change Perspective: Remember that there are multiple ways to solve any problem. If you feel stuck, changing perspective can help generate fresh ideas. A perspective change might entail seeking advice of a mentor or expert, understanding the context of a situation, or taking a break and returning to the problem later. “A sterile or familiar environment can stifle new thinking and new perspectives,” says Carella. “Make sure you get out to draw inspiration from spaces and people out of your usual reach.”
- Break Down Silos: To invite the greatest possible number of perspectives to any problem, encourage teams to work cross-departmentally. This not only combines diverse expertise, but also creates a more trusting and collaborative environment, which is essential to effective CPS. According to Carella, “Big challenges are always best tackled by a group of people rather than left to a single individual. Make sure you create a space where the team can concentrate and convene.”
- Employ Strong Leadership or a Facilitator: Some companies choose to hire an external facilitator that teaches problem solving techniques, best practices, and practicums to stimulate creative problem solving. But, internal managers and staff can also oversee these activities. Regardless of whether the facilitator is internal or external, choose a strong leader who will value others’ ideas and make space for creative solutions. Mattimore has specific advice regarding the role of a facilitator: “When facilitating, get the group to name a promising idea (it will crystalize the idea and make it more memorable), and facilitate deeper rather than broader. Push for not only ideas, but how an idea might specifically work, some of its possible benefits, who and when would be interested in an idea, etc. This fleshing-out process with a group will generate fewer ideas, but at the end of the day will yield more useful concepts that might be profitably pursued.” Additionally, Carella says that “Executives and managers don’t necessarily have to be creative problem solvers, but need to make sure that their teams are equipped with the right tools and resources to make this happen. Also they need to be able to foster an environment where failing fast is accepted and celebrated.”
- Evaluate Your Current Processes: This practice can help you unlock bottlenecks, and also identify gaps in your data and information management, both of which are common roots of business problems.
MacLeod offers the following additional advice, “Always get the facts. Don’t jump too quickly to a solution – working through [problems] takes time and patience.”
Mattimore also stresses that how you introduce creative problem solving is important. “Do not start by introducing a new company-wide innovation process,” he says. “Instead, encourage smaller teams to pursue specific creative projects, and then build a process from the ground up by emulating these smaller teams’ successful approaches. We say: ‘You don’t innovate by changing the culture, you change the culture by innovating.’”
Barriers to Effective Problem Solving
Learning how to effectively solve problems is difficult and takes time and continual adaptation. There are several common barriers to successful CPS, including:
- Confirmation Bias: The tendency to only search for or interpret information that confirms a person’s existing ideas. People misinterpret or disregard data that doesn’t align with their beliefs.
- Mental Set: People’s inclination to solve problems using the same tactics they have used to solve problems in the past. While this can sometimes be a useful strategy (see Analogical Thinking in a later section), it often limits inventiveness and creativity.
- Functional Fixedness: This is another form of narrow thinking, where people become “stuck” thinking in a certain way and are unable to be flexible or change perspective.
- Unnecessary Constraints: When people are overwhelmed with a problem, they can invent and impose additional limits on solution avenues. To avoid doing this, maintain a structured, level-headed approach to evaluating causes, effects, and potential solutions.
- Groupthink: Be wary of the tendency for group members to agree with each other — this might be out of conflict avoidance, path of least resistance, or fear of speaking up. While this agreeableness might make meetings run smoothly, it can actually stunt creativity and idea generation, therefore limiting the success of your chosen solution.
- Irrelevant Information: The tendency to pile on multiple problems and factors that may not even be related to the challenge at hand. This can cloud the team’s ability to find direct, targeted solutions.
- Paradigm Blindness: This is found in people who are unwilling to adapt or change their worldview, outlook on a particular problem, or typical way of processing information. This can erode the effectiveness of problem solving techniques because they are not aware of the narrowness of their thinking, and therefore cannot think or act outside of their comfort zone.
According to Jaffa, the primary barrier of effective problem solving is rigidity. “The most common things people say are, ‘We’ve never done it before,’ or ‘We’ve always done it this way.’” While these feelings are natural, Jaffa explains that this rigid thinking actually precludes teams from identifying creative, inventive solutions that result in the greatest benefit.
“The biggest barrier to creative problem solving is a lack of awareness – and commitment to – training employees in state-of-the-art creative problem-solving techniques,” Mattimore explains. “We teach our clients how to use ideation techniques (as many as two-dozen different creative thinking techniques) to help them generate more and better ideas. Ideation techniques use specific and customized stimuli, or ‘thought triggers’ to inspire new thinking and new ideas.”
MacLeod adds that ineffective or rushed leadership is another common culprit. “We're always in a rush to fix quickly,” she says. “Sometimes leaders just solve problems themselves, making unilateral decisions to save time. But the investment is well worth it — leaders will have less on their plates if they can teach and eventually trust the team to resolve. Teams feel empowered and engagement and investment increases.”
Strategies for Problem Cause Identification
As discussed, most experts agree that the first and most crucial step in problem solving is defining the problem. Once you’ve done this, however, it may not be appropriate to move straight to the solution phase. Rather, it is often helpful to identify the cause(s) of the problem: This will better inform your solution planning and execution, and help ensure that you don’t fall victim to the same challenges in the future.
Below are some of the most common strategies for identifying the cause of a problem:
- Root Cause Analysis: This method helps identify the most critical cause of a problem. A factor is considered a root cause if removing it prevents the problem from recurring. Performing a root cause analysis is a 12 step process that includes: define the problem, gather data on the factors contributing to the problem, group the factors based on shared characteristics, and create a cause-and-effect timeline to determine the root cause. After that, you identify and evaluate corrective actions to eliminate the root cause.

Download Fishbone Diagram Template - Excel

Download 5 Whys Template Excel | Word | PDF
Problem Solving Techniques and Strategies
In this section, we’ll explain several traditional and creative problem solving methods that you can use to identify challenges, create actionable goals, and resolve problems as they arise. Although there is often procedural and objective crossover among techniques, they are grouped by theme so you can identify which method works best for your organization.
Divergent Creative Problem Solving Techniques
Brainstorming: One of the most common methods of divergent thinking, brainstorming works best in an open group setting where everyone is encouraged to share their creative ideas. The goal is to generate as many ideas as possible – you analyze, critique, and evaluate the ideas only after the brainstorming session is complete. To learn more specific brainstorming techniques, read this article .
Mind Mapping: This is a visual thinking tool where you graphically depict concepts and their relation to one another. You can use mind mapping to structure the information you have, analyze and synthesize it, and generate solutions and new ideas from there. The goal of a mind map is to simplify complicated problems so you can more clearly identify solutions.
Appreciative Inquiry (AI): The basic assumption of AI is that “an organization is a mystery to be embraced.” Using this principle, AI takes a positive, inquisitive approach to identifying the problem, analyzing the causes, and presenting possible solutions. The five principles of AI emphasize dialogue, deliberate language and outlook, and social bonding.
Lateral Thinking: This is an indirect problem solving approach centered on the momentum of idea generation. As opposed to critical thinking, where people value ideas based on their truth and the absence of errors, lateral thinking values the “movement value” of new ideas: This means that you reward team members for producing a large volume of new ideas rapidly. With this approach, you’ll generate many new ideas before approving or rejecting any.
Problem Solving Techniques to Change Perspective
Constructive Controversy: This is a structured approach to group decision making to preserve critical thinking and disagreement while maintaining order. After defining the problem and presenting multiple courses of action, the group divides into small advocacy teams who research, analyze, and refute a particular option. Once each advocacy team has presented its best-case scenario, the group has a discussion (advocacy teams still defend their presented idea). Arguing and playing devil’s advocate is encouraged to reach an understanding of the pros and cons of each option. Next, advocacy teams abandon their cause and evaluate the options openly until they reach a consensus. All team members formally commit to the decision, regardless of whether they advocated for it at the beginning. You can learn more about the goals and steps in constructive controversy here .
Carella is a fan of this approach. “Create constructive controversy by having two teams argue the pros and cons of a certain idea,” he says. “It forces unconscious biases to surface and gives space for new ideas to formulate.”
Abstraction: In this method, you apply the problem to a fictional model of the current situation. Mapping an issue to an abstract situation can shed extraneous or irrelevant factors, and reveal places where you are overlooking obvious solutions or becoming bogged down by circumstances.
Analogical Thinking: Also called analogical reasoning , this method relies on an analogy: using information from one problem to solve another problem (these separate problems are called domains). It can be difficult for teams to create analogies among unrelated problems, but it is a strong technique to help you identify repeated issues, zoom out and change perspective, and prevent the problems from occurring in the future. .
CATWOE: This framework ensures that you evaluate the perspectives of those whom your decision will impact. The factors and questions to consider include (which combine to make the acronym CATWOE):
- Customers: Who is on the receiving end of your decisions? What problem do they currently have, and how will they react to your proposed solution?
- Actors: Who is acting to bring your solution to fruition? How will they respond and be affected by your decision?
- Transformation Process: What processes will you employ to transform your current situation and meet your goals? What are the inputs and outputs?
- World View: What is the larger context of your proposed solution? What is the larger, big-picture problem you are addressing?
- Owner: Who actually owns the process? How might they influence your proposed solution (positively or negatively), and how can you influence them to help you?
- Environmental Constraints: What are the limits (environmental, resource- and budget-wise, ethical, legal, etc.) on your ideas? How will you revise or work around these constraints?
Complex Problem Solving
Soft Systems Methodology (SSM): For extremely complex problems, SSM can help you identify how factors interact, and determine the best course of action. SSM was borne out of organizational process modeling and general systems theory, which hold that everything is part of a greater, interconnected system: This idea works well for “hard” problems (where logic and a single correct answer are prioritized), and less so for “soft” problems (i.e., human problems where factors such as personality, emotions, and hierarchy come into play). Therefore, SSM defines a seven step process for problem solving:
- Begin with the problem or problematic situation
- Express the problem or situation and build a rich picture of the themes of the problem
- Identify the root causes of the problem (most commonly with CATWOE)
- Build conceptual models of human activity surrounding the problem or situation
- Compare models with real-world happenings
- Identify changes to the situation that are both feasible and desirable
- Take action to implement changes and improve the problematic situation
SSM can be used for any complex soft problem, and is also a useful tool in change management .
Failure Mode and Effects Analysis (FMEA): This method helps teams anticipate potential problems and take steps to mitigate them. Use FMEA when you are designing (redesigning) a complex function, process, product, or service. First, identify the failure modes, which are the possible ways that a project could fail. Then, perform an effects analysis to understand the consequences of each of the potential downfalls. This exercise is useful for internalizing the severity of each potential failure and its effects so you can make adjustments or safeties in your plan.

Download FMEA Template
Problem Solving Based on Data or Logic (Heuristic Methods)
TRIZ: A Russian-developed problem solving technique that values logic, analysis, and forecasting over intuition or soft reasoning. TRIZ (translated to “theory of inventive problem solving” or TIPS in English) is a systematic approach to defining and identifying an inventive solution to difficult problems. The method offers several strategies for arriving at an inventive solution, including a contradictions matrix to assess trade-offs among solutions, a Su-Field analysis which uses formulas to describe a system by its structure, and ARIZ (algorithm of inventive problem solving) which uses algorithms to find inventive solutions.
Inductive Reasoning: A logical method that uses evidence to conclude that a certain answer is probable (this is opposed to deductive reasoning, where the answer is assumed to be true). Inductive reasoning uses a limited number of observations to make useful, logical conclusions (for example, the Scientific Method is an extreme example of inductive reasoning). However, this method doesn’t always map well to human problems in the workplace — in these instances, managers should employ intuitive inductive reasoning , which allows for more automatic, implicit conclusions so that work can progress. This, of course, retains the principle that these intuitive conclusions are not necessarily the one and only correct answer.
Process-Oriented Problem Solving Methods
Plan Do Check Act (PDCA): This is an iterative management technique used to ensure continual improvement of products or processes. First, teams plan (establish objectives to meet desired end results), then do (implement the plan, new processes, or produce the output), then check (compare expected with actual results), and finally act (define how the organization will act in the future, based on the performance and knowledge gained in the previous three steps).
Means-End Analysis (MEA): The MEA strategy is to reduce the difference between the current (problematic) state and the goal state. To do so, teams compile information on the multiple factors that contribute to the disparity between the current and goal states. Then they try to change or eliminate the factors one by one, beginning with the factor responsible for the greatest difference in current and goal state. By systematically tackling the multiple factors that cause disparity between the problem and desired outcome, teams can better focus energy and control each step of the process.
Hurson’s Productive Thinking Model: This technique was developed by Tim Hurson, and is detailed in his 2007 book Think Better: An Innovator’s Guide to Productive Thinking . The model outlines six steps that are meant to give structure while maintaining creativity and critical thinking: 1) Ask “What is going on?” 2) Ask “What is success?” 3) Ask “What is the question?” 4) Generate answers 5) Forge the solution 6) Align resources.
Control Influence Accept (CIA): The basic premise of CIA is that how you respond to problems determines how successful you will be in overcoming them. Therefore, this model is both a problem solving technique and stress-management tool that ensures you aren’t responding to problems in a reactive and unproductive way. The steps in CIA include:
- Control: Identify the aspects of the problem that are within your control.
- Influence: Identify the aspects of the problem that you cannot control, but that you can influence.
- Accept: Identify the aspects of the problem that you can neither control nor influence, and react based on this composite information.
GROW Model: This is a straightforward problem solving method for goal setting that clearly defines your goals and current situation, and then asks you to define the potential solutions and be realistic about your chosen course of action. The steps break down as follows:
- Goal: What do you want?
- Reality: Where are you now?
- Options: What could you do?
- Will: What will you do?
OODA Loop: This acronym stands for observe, orient, decide, and act. This approach is a decision-making cycle that values agility and flexibility over raw human force. It is framed as a loop because of the understanding that any team will continually encounter problems or opponents to success and have to overcome them.
There are also many un-named creative problem solving techniques that follow a sequenced series of steps. While the exact steps vary slightly, they all follow a similar trajectory and aim to accomplish similar goals of problem, cause, and goal identification, idea generation, and active solution implementation.
| Identify Goal | Define Problem | Define Problem |
| Gather Data | Define Causes | Identify Options |
| Clarify Problem | Generate Ideas | Evaluate Options |
| Generate Ideas | Choose the Best Solution | Implement Solution |
| Select Solution | Take Action | - |
MacLeod offers her own problem solving procedure, which echoes the above steps:
“1. Recognize the Problem: State what you see. Sometimes the problem is covert. 2. Identify: Get the facts — What exactly happened? What is the issue? 3. and 4. Explore and Connect: Dig deeper and encourage group members to relate their similar experiences. Now you're getting more into the feelings and background [of the situation], not just the facts. 5. Possible Solutions: Consider and brainstorm ideas for resolution. 6. Implement: Choose a solution and try it out — this could be role play and/or a discussion of how the solution would be put in place. 7. Evaluate: Revisit to see if the solution was successful or not.”
Many of these problem solving techniques can be used in concert with one another, or multiple can be appropriate for any given problem. It’s less about facilitating a perfect CPS session, and more about encouraging team members to continually think outside the box and push beyond personal boundaries that inhibit their innovative thinking. So, try out several methods, find those that resonate best with your team, and continue adopting new techniques and adapting your processes along the way.
Improve Problem Solving with Work Management in Smartsheet
Empower your people to go above and beyond with a flexible platform designed to match the needs of your team — and adapt as those needs change.
The Smartsheet platform makes it easy to plan, capture, manage, and report on work from anywhere, helping your team be more effective and get more done. Report on key metrics and get real-time visibility into work as it happens with roll-up reports, dashboards, and automated workflows built to keep your team connected and informed.
When teams have clarity into the work getting done, there’s no telling how much more they can accomplish in the same amount of time. Try Smartsheet for free, today.
Discover why over 90% of Fortune 100 companies trust Smartsheet to get work done.

An official website of the United States government
The .gov means it’s official. Federal government websites often end in .gov or .mil. Before sharing sensitive information, make sure you’re on a federal government site.
The site is secure. The https:// ensures that you are connecting to the official website and that any information you provide is encrypted and transmitted securely.
- Publications
- Account settings
The PMC website is updating on October 15, 2024. Learn More or Try it out now .
- Advanced Search
- Journal List
- Front Hum Neurosci
Real World Problem-Solving
Real world problem-solving (RWPS) is what we do every day. It requires flexibility, resilience, resourcefulness, and a certain degree of creativity. A crucial feature of RWPS is that it involves continuous interaction with the environment during the problem-solving process. In this process, the environment can be seen as not only a source of inspiration for new ideas but also as a tool to facilitate creative thinking. The cognitive neuroscience literature in creativity and problem-solving is extensive, but it has largely focused on neural networks that are active when subjects are not focused on the outside world, i.e., not using their environment. In this paper, I attempt to combine the relevant literature on creativity and problem-solving with the scattered and nascent work in perceptually-driven learning from the environment. I present my synthesis as a potential new theory for real world problem-solving and map out its hypothesized neural basis. I outline some testable predictions made by the model and provide some considerations and ideas for experimental paradigms that could be used to evaluate the model more thoroughly.
1. Introduction
In the Apollo 13 space mission, astronauts together with ground control had to overcome several challenges to bring the team safely back to Earth (Lovell and Kluger, 2006 ). One of these challenges was controlling carbon dioxide levels onboard the space craft: “For 2 days straight [they] had worked on how to jury-rig the Odysseys canisters to the Aquarius's life support system. Now, using materials known to be available onboard the spacecraft—a sock, a plastic bag, the cover of a flight manual, lots of duct tape, and so on—the crew assembled a strange contraption and taped it into place. Carbon dioxide levels immediately began to fall into the safe range” (Team, 1970 ; Cass, 2005 ).
The success of Apollo 13's recovery from failure is often cited as a glowing example of human resourcefulness and inventiveness alongside more well-known inventions and innovations over the course of human history. However, this sort of inventive capability is not restricted to a few creative geniuses, but an ability present in all of us, and exemplified in the following mundane example. Consider a situation when your only suit is covered in lint and you do not own a lint remover. You see a roll of duct tape, and being resourceful you reason that it might be a good substitute. You then solve the problem of lint removal by peeling a full turn's worth of tape and re-attaching it backwards onto the roll to expose the sticky side all around the roll. By rolling it over your suit, you can now pick up all the lint.
In both these examples (historic as well as everyday), we see evidence for our innate ability to problem-solve in the real world. Solving real world problems in real time given constraints posed by one's environment are crucial for survival. At the core of this skill is our mental capability to get out of “sticky situations” or impasses, i.e., difficulties that appear unexpectedly as impassable roadblocks to solving the problem at hand. But, what are the cognitive processes that enable a problem solver to overcome such impasses and arrive at a solution, or at least a set of promising next steps?
A central aspect of this type of real world problem solving, is the role played by the solver's surrounding environment during the problem-solving process. Is it possible that interaction with one's environment can facilitate creative thinking? The answer to this question seems somewhat obvious when one considers the most famous anecdotal account of creative problem solving, namely that of Archimedes of Syracuse. During a bath, he found a novel way to check if the King's crown contained non-gold impurities. The story has traditionally been associated with the so-called “Eureka moment,” the sudden affective experience when a solution to a particularly thorny problem emerges. In this paper, I want to temporarily turn our attention away from the specific “aha!” experience itself and take particular note that Archimedes made this discovery, not with his eyes closed at a desk, but in a real-world context of a bath 1 . The bath was not only a passive, relaxing environment for Archimedes, but also a specific source of inspiration. Indeed it was his noticing the displacement of water that gave him a specific methodology for measuring the purity of the crown; by comparing how much water a solid gold bar of the same weight would displace as compared with the crown. This sort of continuous environmental interaction was present when the Apollo 13 engineers discovered their life-saving solution, and when you solved the suit-lint-removal problem with duct tape.
The neural mechanisms underlying problem-solving have been extensively studied in the literature, and there is general agreement about the key functional networks and nodes involved in various stages of problem-solving. In addition, there has been a great deal of work in studying the neural basis for creativity and insight problem solving, which is associated with the sudden emergence of solutions. However, in the context of problem-solving, creativity, and insight have been researched as largely an internal process without much interaction with and influence from the external environment (Wegbreit et al., 2012 ; Abraham, 2013 ; Kounios and Beeman, 2014 ) 2 . Thus, there are open questions of what role the environment plays during real world problem-solving (RWPS) and how the brain enables the assimilation of novel items during these external interactions.
In this paper, I synthesize the literature on problem-solving, creativity and insight, and particularly focus on how the environment can inform RWPS. I explore three environmentally-informed mechanisms that could play a critical role: (1) partial-cue driven context-shifting, (2) heuristic prototyping and learning novel associations, and (3) learning novel physical inferences. I begin first with some intuitions about real world problem solving, that might help ground this discussion and providing some key distinctions from more traditional problem solving research. Then, I turn to a review of the relevant literature on problem-solving, creativity, and insight first, before discussing the three above-mentioned environmentally-driven mechanisms. I conclude with a potential new model and map out its hypothesized neural basis.
2. Problem solving, creativity, and insight
2.1. what is real world problem-solving.
Archimedes was embodied in the real world when he found his solution. In fact, the real world helped him solve the problem. Whether or not these sorts of historic accounts of creative inspiration are accurate 3 , they do correlate with some of our own key intuitions about how problem solving occurs “in the wild.” Real world problem solving (RWPS) is different from those that occur in a classroom or in a laboratory during an experiment. They are often dynamic and discontinuous, accompanied by many starts and stops. Solvers are never working on just one problem. Instead, they are simultaneously juggling several problems of varying difficulties and alternating their attention between them. Real world problems are typically ill-defined, and even when they are well-defined, often have open-ended solutions. Coupled with that is the added aspect of uncertainty associated with the solver's problem solving strategies. As introduced earlier, an important dimension of RWPS is the continuous interaction between the solver and their environment. During these interactions, the solver might be inspired or arrive at an “aha!” moment. However, more often than not, the solver experiences dozens of minor discovery events— “hmmm, interesting…” or “wait, what?…” moments. Like discovery events, there's typically never one singular impasse or distraction event. The solver must iterate through the problem solving process experiencing and managing these sorts of intervening events (including impasses and discoveries). In summary, RWPS is quite messy and involves a tight interplay between problem solving, creativity, and insight. Next, I explore each of these processes in more detail and explicate a possible role of memory, attention, conflict management and perception.
2.2. Analytical problem-solving
In psychology and neuroscience, problem-solving broadly refers to the inferential steps taken by an agent 4 that leads from a given state of affairs to a desired goal state (Barbey and Barsalou, 2009 ). The agent does not immediately know how this goal can be reached and must perform some mental operations (i.e., thinking) to determine a solution (Duncker, 1945 ).
The problem solving literature divides problems based on clarity (well-defined vs. ill-defined) or on the underlying cognitive processes (analytical, memory retrieval, and insight) (Sprugnoli et al., 2017 ). While memory retrieval is an important process, I consider it as a sub-process to problem solving more generally. I first focus on analytical problem-solving process, which typically involves problem-representation and encoding, and the process of forming and executing a solution plan (Robertson, 2016 ).
2.2.1. Problem definition and representation
An important initial phase of problem-solving involves defining the problem and forming a representation in the working memory. During this phase, components of the prefrontal cortex (PFC), default mode network (DMN), and the dorsal anterior cingulate cortex (dACC) have been found to be activated. If the problem is familiar and well-structured, top-down executive control mechanisms are engaged and the left prefrontal cortex including the frontopolar, dorso-lateral (dlPFC), and ventro-lateral (vlPFC) are activated (Barbey and Barsalou, 2009 ). The DMN along with the various structures in the medial temporal lobe (MTL) including the hippocampus (HF), parahippocampal cortex, perirhinal and entorhinal cortices are also believed to have limited involvement, especially in episodic memory retrieval activities during this phase (Beaty et al., 2016 ). The problem representation requires encoding problem information for which certain visual and parietal areas are also involved, although the extent of their involvement is less clear (Anderson and Fincham, 2014 ; Anderson et al., 2014 ).
2.2.1.1. Working memory
An important aspect of problem representation is the engagement and use of working memory (WM). The WM allows for the maintenance of relevant problem information and description in the mind (Gazzaley and Nobre, 2012 ). Research has shown that WM tasks consistently recruit the dlPFC and left inferior frontal cortex (IC) for encoding an manipulating information; dACC for error detection and performance adjustment; and vlPFC and the anterior insula (AI) for retrieving, selecting information and inhibitory control (Chung and Weyandt, 2014 ; Fang et al., 2016 ).
2.2.1.2. Representation
While we generally have a sense for the brain regions that are functionally influential in problem definition, less is known about how exactly events are represented within these regions. One theory for how events are represented in the PFC is the structured event complex theory (SEC), in which components of the event knowledge are represented by increasingly higher-order convergence zones localized within the PFC, akin to the convergence zones (from posterior to anterior) that integrate sensory information in the brain (Barbey et al., 2009 ). Under this theory, different zones in the PFC (left vs. right, anterior vs. posterior, lateral vs. medial, and dorsal vs. ventral) represent different aspects of the information contained in the events (e.g., number of events to be integrated together, the complexity of the event, whether planning, and action is needed). Other studies have also suggested the CEN's role in tasks requiring cognitive flexibility, and functions to switch thinking modes, levels of abstraction of thought and consider multiple concepts simultaneously (Miyake et al., 2000 ).
Thus, when the problem is well-structured, problem representation is largely an executive control activity coordinated by the PFC in which problem information from memory populates WM in a potentially structured representation. Once the problem is defined and encoded, planning and execution of a solution can begin.
2.2.2. Planning
The central executive network (CEN), particularly the PFC, is largely involved in plan formation and in plan execution. Planning is the process of generating a strategy to advance from the current state to a goal state. This in turn involves retrieving a suitable solution strategy from memory and then coordinating its execution.
2.2.2.1. Plan formation
The dlPFC supports sequential planning and plan formation, which includes the generation of hypothesis and construction of plan steps (Barbey and Barsalou, 2009 ). Interestingly, the vlPFC and the angular gyrus (AG), implicated in a variety of functions including memory retrieval, are also involved in plan formation (Anderson et al., 2014 ). Indeed, the AG together with the regions in the MTL (including the HF) and several other regions form a what is known as the “core” network. The core network is believed to be activated when recalling past experiences, imagining fictitious, and future events and navigating large-scale spaces (Summerfield et al., 2010 ), all key functions for generating plan hypotheses. A recent study suggests that the AG is critical to both episodic simulation, representation, and episodic memory (Thakral et al., 2017 ). One possibility for how plans are formulated could involve a dynamic process of retrieving an optimal strategy from memory. Research has shown significant interaction between striatal and frontal regions (Scimeca and Badre, 2012 ; Horner et al., 2015 ). The striatum is believed to play a key role in declarative memory retrieval, and specifically helping retrieve optimal (or previously rewarded) memories (Scimeca and Badre, 2012 ). Relevant to planning and plan formation, Scimeca & Badre have suggested that the striatum plays two important roles: (1) in mapping acquired value/utility to action selection, and thereby helping plan formation, and (2) modulation and re-encoding of actions and other plan parameters. Different types of problems require different sets of specialized knowledge. For example, the knowledge needed to solve mathematical problems might be quite different (albeit overlapping) from the knowledge needed to select appropriate tools in the environment.
Thus far, I have discussed planning and problem representation as being domain-independent, which has allowed me to outline key areas of the PFC, MTL, and other regions relevant to all problem-solving. However, some types of problems require domain-specific knowledge for which other regions might need to be recruited. For example, when planning for tool-use, the superior parietal lobe (SPL), supramarginal gyrus (SMG), anterior inferior parietal lobe (AIPL), and certain portions of the temporal and occipital lobe involved in visual and spatial integration have been found to be recruited (Brandi et al., 2014 ). It is believed that domain-specific information stored in these regions is recovered and used for planning.
2.2.2.2. Plan execution
Once a solution plan has been recruited from memory and suitably tuned for the problem on hand, the left-rostral PFC, caudate nucleus (CN), and bilateral posterior parietal cortices (PPC) are responsible for translating the plan into executable form (Stocco et al., 2012 ). The PPC stores and maintains “mental template” of the executable form. Hemispherical division of labor is particularly relevant in planning where it was shown that when planning to solve a Tower of Hanoi (block moving) problem, the right PFC is involved in plan construction whereas the left PFC is involved in controlling processes necessary to supervise the execution of the plan (Newman and Green, 2015 ). On a separate note and not the focus of this paper, plan execution and problem-solving can require the recruitment of affective and motivational processing in order to supply the agent with the resolve to solve problems, and the vmPFC has been found to be involved in coordinating this process (Barbey and Barsalou, 2009 ).
2.3. Creativity
During the gestalt movement in the 1930s, Maier noted that “most instances of “real” problem solving involves creative thinking” (Maier, 1930 ). Maier performed several experiments to study mental fixation and insight problem solving. This close tie between insight and creativity continues to be a recurring theme, one that will be central to the current discussion. If creativity and insight are linked to RWPS as noted by Maier, then it is reasonable to turn to the creativity and insight literature for understanding the role played by the environment. A large portion of the creativity literature has focused on viewing creativity as an internal process, one in which the solvers attention is directed inwards, and toward internal stimuli, to facilitate the generation of novel ideas and associations in memory (Beaty et al., 2016 ). Focusing on imagination, a number of researchers have looked at blinking, eye fixation, closing eyes, and looking nowhere behavior and suggested that there is a shift of attention from external to internal stimuli during creative problem solving (Salvi and Bowden, 2016 ). The idea is that shutting down external stimuli reduces cognitive load and focuses attention internally. Other experiments studying sleep behavior have also noted the beneficial role of internal stimuli in problem solving. The notion of ideas popping into ones consciousness, suddenly, during a shower is highly intuitive for many and researchers have attempted to study this phenomena through the lens of incubation, and unconscious thought that is internally-driven. There have been several theories and counter-theories proposed to account specifically for the cognitive processes underlying incubation (Ritter and Dijksterhuis, 2014 ; Gilhooly, 2016 ), but none of these theories specifically address the role of the external environment.
The neuroscience of creativity has also been extensively studied and I do not focus on an exhaustive literature review in this paper (a nice review can be found in Sawyer, 2011 ). From a problem-solving perspective, it has been found that unlike well-structured problems, ill-structured problems activate the right dlPFC. Most of the past work on creativity and creative problem-solving has focused on exploring memory structures and performing internally-directed searches. Creative idea generation has primarily been viewed as internally directed attention (Jauk et al., 2012 ; Benedek et al., 2016 ) and a primary mechanism involved is divergent thinking , which is the ability to produce a variety of responses in a given situation (Guilford, 1962 ). Divergent thinking is generally thought to involve interactions between the DMN, CEN, and the salience network (Yoruk and Runco, 2014 ; Heinonen et al., 2016 ). One psychological model of creative cognition is the Geneplore model that considers two major phases of generation (memory retrieval and mental synthesis) and exploration (conceptual interpretation and functional inference) (Finke et al., 1992 ; Boccia et al., 2015 ). It has been suggested that the associative mode of processing to generate new creative association is supported by the DMN, which includes the medial PFC, posterior cingulate cortex (PCC), tempororparietal juntion (TPJ), MTL, and IPC (Beaty et al., 2014 , 2016 ).
That said, the creativity literature is not completely devoid of acknowledging the role of the environment. In fact, it is quite the opposite. Researchers have looked closely at the role played by externally provided hints from the time of the early gestalt psychologists and through to present day studies (Öllinger et al., 2017 ). In addition to studying how hints can help problem solving, researchers have also looked at how directed action can influence subsequent problem solving—e.g., swinging arms prior to solving the two-string puzzle, which requires swinging the string (Thomas and Lleras, 2009 ). There have also been numerous studies looking at how certain external perceptual cues are correlated with creativity measures. Vohs et al. suggested that untidiness in the environment and the increased number of potential distractions helps with creativity (Vohs et al., 2013 ). Certain colors such as blue have been shown to help with creativity and attention to detail (Mehta and Zhu, 2009 ). Even environmental illumination, or lack thereof, have been shown to promote creativity (Steidle and Werth, 2013 ). However, it is important to note that while these and the substantial body of similar literature show the relationship of the environment to creative problem solving, they do not specifically account for the cognitive processes underlying the RWPS when external stimuli are received.
2.4. Insight problem solving
Analytical problem solving is believed to involve deliberate and conscious processing that advances step by step, allowing solvers to be able to explain exactly how they solved it. Inability to solve these problems is often associated with lack of required prior knowledge, which if provided, immediately makes the solution tractable. Insight, on the other hand, is believed to involve a sudden and unexpected emergence of an obvious solution or strategy sometimes accompanied by an affective aha! experience. Solvers find it difficult to consciously explain how they generated a solution in a sequential manner. That said, research has shown that having an aha! moment is neither necessary nor sufficient to insight and vice versa (Danek et al., 2016 ). Generally, it is believed that insight solvers acquire a full and deep understanding of the problem when they have solved it (Chu and Macgregor, 2011 ). There has been an active debate in the problem solving community about whether insight is something special. Some have argued that it is not, and that there are no special or spontaneous processes, but simply a good old-fashioned search of a large problem space (Kaplan and Simon, 1990 ; MacGregor et al., 2001 ; Ash and Wiley, 2006 ; Fleck, 2008 ). Others have argued that insight is special and suggested that it is likely a different process (Duncker, 1945 ; Metcalfe, 1986 ; Kounios and Beeman, 2014 ). This debate lead to two theories for insight problem solving. MacGregor et al. proposed the Criterion for Satisfactory Progress Theory (CSPT), which is based on Newell and Simons original notion of problem solving as being a heuristic search through the problem space (MacGregor et al., 2001 ). The key aspect of CSPT is that the solver is continually monitoring their progress with some set of criteria. Impasses arise when there is a criterion failure, at which point the solver tries non-maximal but promising states. The representational change theory (RCT) proposed by Ohlsson et al., on the other hand, suggests that impasses occur when the goal state is not reachable from an initial problem representation (which may have been generated through unconscious spreading activation) (Ohlsson, 1992 ). In order to overcome an impasse, the solver needs to restructure the problem representation, which they can do by (1) elaboration (noticing new features of a problem), (2) re-encoding fixing mistaken or incomplete representations of the problem, and by (3) changing constraints. Changing constraints is believed to involve two sub-processes of constraint relaxation and chunk-decomposition.
The current position is that these two theories do not compete with each other, but instead complement each other by addressing different stages of problem solving: pre- and post-impasse. Along these lines, Ollinger et al. proposed an extended RCT (eRCT) in which revising the search space and using heuristics was suggested as being a dynamic and iterative and recursive process that involves repeated instances of search, impasse and representational change (Öllinger et al., 2014 , 2017 ). Under this theory, a solver first forms a problem representation and begins searching for solutions, presumably using analytical problem solving processes as described earlier. When a solution cannot be found, the solver encounters an impasse, at which point the solver must restructure or change the problem representation and once again search for a solution. The model combines both analytical problem solving (through heuristic searches, hill climbing and progress monitoring), and creative mechanisms of constraint relaxation and chunk decomposition to enable restructuring.
Ollingers model appears to comprehensively account for both analytical and insight problem solving and, therefore, could be a strong candidate to model RWPS. However, while compelling, it is nevertheless an insufficient model of RWPS for many reasons, of which two are particularly significant for the current paper. First, the model does explicitly address mechanisms by which external stimuli might be assimilated. Second, the model is not sufficiently flexible to account for other events (beyond impasse) occurring during problem solving, such as distraction, mind-wandering and the like.
So, where does this leave us? I have shown the interplay between problem solving, creativity and insight. In particular, using Ollinger's proposal, I have suggested (maybe not quite explicitly up until now) that RWPS involves some degree of analytical problem solving as well as the post-impasse more creative modes of problem restructuring. I have also suggested that this model might need to be extended for RWPS along two dimensions. First, events such as impasses might just be an instance of a larger class of events that intervene during problem solving. Thus, there needs to be an accounting of the cognitive mechanisms that are potentially influenced by impasses and these other intervening events. It is possible that these sorts of events are crucial and trigger a switch in attentional focus, which in turn facilitates switching between different problem solving modes. Second, we need to consider when and how externally-triggered stimuli from the solver's environment can influence the problem solving process. I detail three different mechanisms by which external knowledge might influence problem solving. I address each of these ideas in more detail in the next two sections.
3. Event-triggered mode switching during problem-solving
3.1. impasse.
When solving certain types of problems, the agent might encounter an impasse, i.e., some block in its ability to solve the problem (Sprugnoli et al., 2017 ). The impasse may arise because the problem may have been ill-defined to begin with causing incomplete and unduly constrained representations to have been formed. Alternatively, impasses can occur when suitable solution strategies cannot be retrieved from memory or fail on execution. In certain instances, the solution strategies may not exist and may need to be generated from scratch. Regardless of the reason, an impasse is an interruption in the problem solving process; one that was running conflict-free up until the point when a seemingly unresolvable issue or an error in the predicted solution path was encountered. Seen as a conflict encountered in the problem-solving process it activates the anterior cingulate cortex (ACC). It is believed that the ACC not only helps detect the conflict, but also switch modes from one of “exploitation” (planning) to “exploration” (search) (Quilodran et al., 2008 ; Tang et al., 2012 ), and monitors progress during resolution (Chu and Macgregor, 2011 ). Some mode switching duties are also found to be shared with the AI (the ACC's partner in the salience network), however, it is unclear exactly the extent of this function-sharing.
Even though it is debatable if impasses are a necessary component of insight, they are still important as they provide a starting point for the creativity (Sprugnoli et al., 2017 ). Indeed, it is possible that around the moment of impasse, the AI and ACC together, as part of the salience network play a crucial role in switching thought modes from analytical planning mode to creative search and discovery mode. In the latter mode, various creative mechanisms might be activated allowing for a solution plan to emerge. Sowden et al. and many others have suggested that the salience network is potentially a candidate neurobiological mechanism for shifting between thinking processes, more generally (Sowden et al., 2015 ). When discussing various dual-process models as they relate to creative cognition, Sowden et al. have even noted that the ACC activation could be useful marker to identify shifting as participants work creative problems.
3.2. Defocused attention
As noted earlier, in the presence of an impasse there is a shift from an exploitative (analytical) thinking mode to an exploratory (creative) thinking mode. This shift impacts several networks including, for example, the attention network. It is believed attention can switch between a focused mode and a defocused mode. Focused attention facilitates analytic thought by constraining activation such that items are considered in a compact form that is amenable to complex mental operations. In the defocused mode, agents expand their attention allowing new associations to be considered. Sowden et al. ( 2015 ) note that the mechanism responsible for adjustments in cognitive control may be linked to the mechanisms responsible for attentional focus. The generally agreed position is that during generative thinking, unconscious cognitive processes activated through defocused attention are more prevalent, whereas during exploratory thinking, controlled cognition activated by focused attention becomes more prevalent (Kaufman, 2011 ; Sowden et al., 2015 ).
Defocused attention allows agents to not only process different aspects of a situation, but to also activate additional neural structures in long term memory and find new associations (Mendelsohn, 1976 ; Yoruk and Runco, 2014 ). It is believed that cognitive material attended to and cued by positive affective state results in defocused attention, allowing for more complex cognitive contexts and therefore a greater range of interpretation and integration of information (Isen et al., 1987 ). High attentional levels are commonly considered a typical feature of highly creative subjects (Sprugnoli et al., 2017 ).
4. Role of the environment
In much of the past work the focus has been on treating creativity as largely an internal process engaging the DMN to assist in making novel connections in memory. The suggestion has been that “individual needs to suppress external stimuli and concentrate on the inner creative process during idea generation” (Heinonen et al., 2016 ). These ideas can then function as seeds for testing and problem-solving. While true of many creative acts, this characterization does not capture how creative ideas arise in many real-world creative problems. In these types of problems, the agent is functioning and interacting with its environment before, during and after problem-solving. It is natural then to expect that stimuli from the environment might play a role in problem-solving. More specifically, it can be expected that through passive and active involvement with the environment, the agent is (1) able to trigger an unrelated, but potentially useful memory relevant for problem-solving, (2) make novel connections between two events in memory with the environmental cue serving as the missing link, and (3) incorporate a completely novel information from events occuring in the environment directly into the problem-solving process. I explore potential neural mechanisms for these three types of environmentally informed creative cognition, which I hypothesize are enabled by defocused attention.
4.1. Partial cues trigger relevant memories through context-shifting
I have previously discussed the interaction between the MTL and PFC in helping select task-relevant and critical memories for problem-solving. It is well-known that pattern completion is an important function of the MTL and one that enables memory retrieval. Complementary Learning Theory (CLS) and its recently updated version suggest that the MTL and related structures support initial storage as well as retrieval of item and context-specific information (Kumaran et al., 2016 ). According to CLS theory, the dentate gyrus (DG) and the CA3 regions of the HF are critical to selecting neural activity patterns that correspond to particular experiences (Kumaran et al., 2016 ). These patterns might be distinct even if experiences are similar and are stabilized through increases in connection strengths between the DG and CA3. Crucially, because of the connection strengths, reactivation of part of the pattern can activate the rest of it (i.e., pattern completion). Kumaran et al. have further noted that if consistent with existing knowledge, these new experiences can be quickly replayed and interleaved into structured representations that form part of the semantic memory.
Cues in the environment provided by these experiences hold partial information about past stimuli or events and this partial information converges in the MTL. CLS accounts for how these cues might serve to reactivate partial patterns, thereby triggering pattern completion. When attention is defocused I hypothesize that (1) previously unnoticed partial cues are considered, and (2) previously noticed partial cues are decomposed to produce previously unnoticed sub-cues, which in turn are considered. Zabelina et al. ( 2016 ) have shown that real-world creativity and creative achievement is associated with “leaky attention,” i.e., attention that allows for irrelevant information to be noticed. In two experiments they systematically explored the relationship between two notions of creativity— divergent thinking and real-world creative achievement—and the use of attention. They found that attentional use is associated in different ways for each of the two notions of creativity. While divergent thinking was associated with flexible attention, it does not appear to be leaky. Instead, selective focus and inhibition components of attention were likely facilitating successful performance on divergent thinking tasks. On the other hand, real-world creative achievement was linked to leaky attention. RWPS involves elements of both divergent thinking and of real-world creative achievement, thus I would expect some amount of attentional leaks to be part of the problem solving process.
Thus, it might be the case that a new set of cues or sub-cues “leak” in and activate memories that may not have been previously considered. These cues serve to reactivate a diverse set of patterns that then enable accessing a wide range of memories. Some of these memories are extra-contextual, in that they consider the newly noticed cues in several contexts. For example, when unable to find a screwdriver, we might consider using a coin. It is possible that defocused attention allows us to consider the coin's edge as being a potentially relevant cue that triggers uses for the thin edge outside of its current context in a coin. The new cues (or contexts) may allow new associations to emerge with cues stored in memory, which can occur during incubation. Objects and contexts are integrated into memory automatically into a blended representation and changing contexts disrupts this recognition (Hayes et al., 2007 ; Gabora, 2016 ). Cue-triggered context shifting allows an agent to break-apart a memory representation, which can then facilitate problem-solving in new ways.
4.2. Heuristic prototyping facilitates novel associations
It has long been the case that many scientific innovations have been inspired by events in nature and the surrounding environment. As noted earlier, Archimedes realized the relationship between the volume of an irregularly shaped object and the volume of water it displaced. This is an example of heuristic prototyping where the problem-solver notices an event in the environment, which then triggers the automatic activation of a heuristic prototype and the formation of novel associations (between the function of the prototype and the problem) which they can then use to solve the problem (Luo et al., 2013 ). Although still in its relative infancy, there has been some recent research into the neural basis for heuristic prototyping. Heuristic prototype has generally been defined as an enlightening prototype event with a similar element to the current problem and is often composed of a feature and a function (Hao et al., 2013 ). For example, in designing a faster and more efficient submarine hull, a heuristic prototype might be a shark's skin, while an unrelated prototype might be a fisheye camera (Dandan et al., 2013 ).
Research has shown that activating the feature function of the right heuristic prototype and linking it by way of semantic similarity to the required function of the problem was the key mechanism people used to solve several scienitific insight problems (Yang et al., 2016 ). A key region activated during heuristic prototyping is the dlPFC and it is believed to be generally responsible for encoding the events into memory and may play an important role in selecting and retrieving the matched unsolved technical problem from memory (Dandan et al., 2013 ). It is also believed that the precuneus plays a role in automatic retrieval of heuristic information allowing the heuristic prototype and the problem to combine (Luo et al., 2013 ). In addition to semantic processing, certain aspects of visual imagery have also been implicated in heuristic prototyping leading to the suggestion of the involvement of Broadman's area BA 19 in the occipital cortex.
There is some degree of overlap between the notions of heuristic prototyping and analogical transfer (the mapping of relations from one domain to another). Analogical transfer is believed to activate regions in the left medial fronto-parietal system (dlPFC and the PPC) (Barbey and Barsalou, 2009 ). I suggest here that analogical reasoning is largely an internally-guided process that is aided by heuristic prototyping which is an externally-guided process. One possible way this could work is if heuristic prototyping mechanisms help locate the relevant memory with which to then subsequently analogize.
4.3. Making physical inferences to acquire novel information
The agent might also be able to learn novel facts about their environment through passive observation as well as active experimentation. There has been some research into the neural basis for causal reasoning (Barbey and Barsalou, 2009 ; Operskalski and Barbey, 2016 ), but beyond its generally distributed nature, we do not know too much more. Beyond abstract causal reasoning, some studies looked into the cortical regions that are activated when people watch and predict physical events unfolding in real-time and in the real-world (Fischer et al., 2016 ). It was found that certain regions were associated with representing types of physical concepts, with the left intraparietal sulcus (IPS) and left middle frontal gyrus (MFG) shown to play a role in attributing causality when viewing colliding objects (Mason and Just, 2013 ). The parahippocampus (PHC) was associated with linking causal theory to observed data and the TPJ was involved in visualizing movement of objects and actions in space (Mason and Just, 2013 ).
5. Proposed theory
I noted earlier that Ollinger's model for insight problem solving, while serving as a good candidate for RWPS, requires extension. In this section, I propose a candidate model that includes some necessary extensions to Ollinger's framework. I begin by laying out some preliminary notions that underlie the proposed model.
5.1. Dual attentional modes
I propose that the attention-switching mechanism described earlier is at the heart of RWPS and enables two modes of operation: focused and defocused mode. In the focused mode, the problem representation is more or less fixed, and problem solving proceeds in a focused and goal directed manner through search, planning, and execution mechanisms. In the defocused mode, problem solving is not necessarily goal directed, but attempts to generate ideas, driven by both internal and external items.
At first glance, these modes might seem similar to convergent and divergent thinking modes postulated by numerous others to account for creative problem solving. Divergent thinking allows for the generation of new ideas and convergent thinking allows for verification and selection of generated ideas. So, it might seem that focused mode and convergent thinking are similar and likewise divergent and defocused mode. They are, however, quite different. The modes relate less to idea generation and verification, and more to the specific mechanisms that are operating with regard to a particular problem at a particular moment in time. Convergent and divergent processes may be occurring during both defocused and focused modes. Some degree of divergent processes may be used to search and identify specific solution strategies in focused mode. Also, there might be some degree of convergent idea verification occuring in defocused mode as candidate items are evaluated for their fit with the problem and goal. Thus, convergent and divergent thinking are one amongst many mechanisms that are utilized in focused and defocused mode. Each of these two modes has to do with degree of attention placed on a particular problem.
There have been numerous dual-process and dual-systems models of cognition proposed over the years. To address criticisms raised against these models and to unify some of the terminology, Evans & Stanovich proposed a dual-process model comprising Type 1 and Type 2 thought (Evans and Stanovich, 2013 ; Sowden et al., 2015 ). Type 1 processes are those that are believed to be autonomous and do not require working memory. Type 2 processes, on the other hand, are believed to require working memory and are cognitively decoupled to prevent real-world representations from becoming confused with mental simulations (Sowden et al., 2015 ). While acknowledging various other attributes that are often used to describe dual process models (e.g., fast/slow, associative/rule-based, automatic/controlled), Evans & Stanovich note that these attributes are merely frequent correlates and not defining characteristics of Type 1 or Type 2 processes. The proposed dual attentional modes share some similarities with the Evans & Stanovich Type 1 and 2 models. Specifically, Type 2 processes might occur in focused attentional mode in the proposed model as they typically involve the working memory and certain amount of analytical thought and planning. Similarly, Type 1 processes are likely engaged in defocused attentional mode as there are notions of associative and generative thinking that might be facilitated when attention has been defocused. The crucial difference between the proposed model and other dual-process models is that the dividing line between focused and defocused attentional modes is the degree of openness to internal and external stimuli (by various networks and functional units in the brain) when problem solving. Many dual process models were designed to classify the “type” of thinking process or a form of cognitive processing. In some sense, the “processes” in dual process theories are characterized by the type of mechanism of operation or the type of output they produced. Here, I instead characterize and differentiate the modes of thinking by the receptivity of different functional units in the brain to input during problem solving.
This, however, raises a different question of the relationship between these attentional modes and conscious vs. unconscious thinking. It is clear that both the conscious and unconscious are involved in problem solving, as well as in RWPS. Here, I claim that a problem being handled is, at any given point in time, in either a focused mode or in a defocused mode. When in the focused mode, problem solving primarily proceeds in a manner that is available for conscious deliberation. More specifically, problem space elements and representations are tightly managed and plans and strategies are available in the working memory and consciously accessible. There are, however, secondary unconscious operations in the focused modes that includes targeted memory retrieval and heuristic-based searches. In the defocused mode, the problem is primarily managed in an unconscious way. The problem space elements are broken apart and loosely managed by various mechanisms that do not allow for conscious deliberation. That said, it is possible that some problem parameters remain accessible. For example, it is possible that certain goal information is still maintained consciously. It is also possible that indexes to all the problems being considered by the solver are maintained and available to conscious awareness.
5.2. RWPS model
Returning to Ollinger's model for insight problem solving, it now becomes readily apparent how this model can be modified to incorporate environmental effects as well as generalizing the notion of intervening events beyond that of impasses. I propose a theory for RWPS that begins with standard analytical problem-solving process (See Figures Figures1, 1 , ,2 2 ).

Summary of neural activations during focused problem-solving (Left) and defocused problem-solving (Right) . During defocused problem-solving, the salience network (insula and ACC) coordinates the switching of several networks into a defocused attention mode that permits the reception of a more varied set of stimuli and interpretations via both the internally-guided networks (default mode network DMN) and externally guided networks (Attention). PFC, prefrontal cortex; ACC, anterior cingulate cortex; PCC, posterior cingulate cortex; IPC, inferior parietal cortex; PPC, posterior parietal cortex; IPS, intra-parietal sulcus; TPJ, temporoparietal junction; MTL, medial temporal lobe; FEF, frontal eye field.

Proposed Model for Real World Problem Solving (RWPS). The corresponding neural correlates are shown in italics. During problem-solving, an initial problem representation is formed based on prior knowledge and available perceptual information. The problem-solving then proceeds in a focused, goal-directed mode until the goal is achieved or a defocusing event (e.g., impasse or distraction) occurs. During focused mode operation, the solver interacts with the environment in directed manner, executing focused plans, and allowing for predicted items to be activated by the environment. When a defocusing event occurs, the problem-solving then switches into a defocused mode until a focusing event (e.g., discovery) occurs. In defocused mode, the solver performs actions unrelated to the problem (or is inactive) and is receptive to a set of environmental triggers that activate novel aspects using the three mechanisms discussed in this paper. When a focusing event occurs, the diffused problem elements cohere into a restructured representation and problem-solving returns into a focused mode.
5.2.1. Focused problem solving mode
Initially, both prior knowledge and perceptual entities help guide the creation of problem representations in working memory. Prior optimal or rewarding solution strategies are obtained from LTM and encoded in the working memory as well. This process is largely analytical and the solver interacts with their environment through focused plan or idea execution, targeted observation of prescribed entities, and estimating prediction error of these known entities. More specifically, when a problem is presented, the problem representations are activated and populated into working memory in the PFC, possibly in structured representations along convergence zones. The PFC along with the Striatum and the MTL together attempt at retrieving an optimal or previously rewarded solution strategy from long term memory. If successfully retrieved, the solution strategy is encoded into the PPC as a mental template, which then guides relevant motor control regions to execute the plan.
5.2.2. Defocusing event-triggered mode switching
The search and solve strategy then proceeds analytically until a “defocusing event” is encountered. The salience network (AI and ACC) monitor for conflicts and attempt to detect any such events in the problem-solving process. As long as no conflicts are detected, the salience network focuses on recruiting networks to achieve goals and suppresses the DMN (Beaty et al., 2016 ). If the plan execution or retrieval of the solution strategy fails, then a defocusing event is detected and the salience network performs mode switching. The salience network dynamically switches from the focused problem-solving mode to a defocused problem-solving mode (Menon, 2015 ). Ollinger's current model does not account for other defocusing events beyond an impasse, but it is not inconceivable that there could be other such events triggered by external stimuli (e.g., distraction or an affective event) or by internal stimuli (e.g., mind wandering).
5.2.3. Defocused problem solving mode
In defocused mode, the problem is operated on by mechanisms that allow for the generation and testing of novel ideas. Several large-scale brain networks are recruited to explore and generate new ideas. The search for novel ideas is facilitated by generally defocused attention, which in turn allows for creative idea generation from both internal as well as external sources. The salience network switches operations from defocused event detection to focused event or discovery detection, whereby for example, environmental events or ideas that are deemed interesting can be detected. During this idea exploration phase, internally, the DMN is no longer suppressed and attempts to generate new ideas for problem-solving. It is known that the IPC is involved in the generation of new ideas (Benedek et al., 2014 ) and together with the PPC in coupling different information together (Simone Sandkühler, 2008 ; Stocco et al., 2012 ). Beaty et al. ( 2016 ) have proposed that even this internal idea-generation process can be goal directed, thereby allowing for a closer working relationship between the CEN and the DMN. They point to neuroimaging evidence that support the possibility that the executive control network (comprising the lateral prefrontal and inferior parietal regions) can constrain and direct the DMN in its process of generating ideas to meet task-specific goals via top down monitoring and executive control (Beaty et al., 2016 ). The control network is believed to maintain an “internal train of thought” by keeping the task goal activated, thereby allowing for strategic and goal-congruent searches for ideas. Moreover, they suggest that the extent of CEN involvement in the DMN idea-generation may depend on the extent to which the creative task is constrained. In the RWPS setting, I would suspect that the internal search for creative solutions is not entirely unconstrained, even in the defocused mode. Instead, the solver is working on a specified problem and thus, must maintain the problem-thread while searching for solutions. Moreover, self-generated ideas must be evaluated against the problem parameters and thereby might need some top-down processing. This would suggest that in such circumstances, we would expect to see an increased involvement of the CEN in constraining the DMN.
On the external front, several mechanisms are operating in this defocused mode. Of particular note are the dorsal attention network, composed of the visual cortex (V), IPS and the frontal eye field (FEF) along with the precuneus and the caudate nucleus allow for partial cues to be considered. The MTL receives synthesized cue and contextual information and populates the WM in the PFC with a potentially expanded set of information that might be relevant for problem-solving. The precuneus, dlPFC and PPC together trigger the activation and use of a heuristic prototype based on an event in the environment. The caudate nucleus facilitates information routing between the PFC and PPC and is involved in learning and skill acquisition.
5.2.4. Focusing event-triggered mode switching
The problem's life in this defocused mode continues until a focusing event occurs, which could be triggered by either external (e.g., notification of impending deadline, discovery of a novel property in the environment) or internal items (e.g., goal completion, discovery of novel association or updated relevancy of a previously irrelevant item). As noted earlier, an internal train of thought may be maintained that facilitates top-down evaluation of ideas and tracking of these triggers (Beaty et al., 2016 ). The salience network switches various networks back to the focused problem-solving mode, but not without the potential for problem restructuring. As noted earlier, problem space elements are maintained somewhat loosely in the defocused mode. Thus, upon a focusing event, a set or subset of these elements cohere into a tight (restructured) representation suitable for focused mode problem solving. The process then repeats itself until the goal has been achieved.
5.3. Model predictions
5.3.1. single-mode operation.
The proposed RWPS model provides several interesting hypotheses, which I discuss next. First, the model assumes that any given problem being worked on is in one mode or another, but not both. Thus, the model predicts that there cannot be focused plan execution on a problem that is in defocused mode. The corollary prediction is that novel perceptual cues (as those discussed in section 4) cannot help the solver when in focused mode. The corollary prediction, presumably has some support from the inattentional blindness literature. Inattentional blindness is when perceptual cues are not noticed during a task (e.g., counting the number of basketball passes between several people, but not noticing a gorilla in the scene) (Simons and Chabris, 1999 ). It is possible that during focused problem solving, that external and internally generated novel ideas are simply not considered for problem solving. I am not claiming that these perceptual cues are always ignored, but that they are not considered within the problem. Sometimes external cues (like distracting occurrences) can serve as defocusing events, but the model predicts that the actual content of these cues are not themselves useful for solving the specific problem at hand.
When comparing dual-process models Sowden et al. ( 2015 ) discuss shifting from one type of thinking to another and explore how this shift relates to creativity. In this regard, they weigh the pros and cons of serial vs. parallel shifts. In dual-process models that suggest serial shifts, it is necessary to disengage one type of thought prior to engaging the other or to shift along a continuum. Whereas, in models that suggest parallel shifts, each of the thinking types can operate in parallel. Per this construction, the proposed RWPS model is serial, however, not quite in the same sense. As noted earlier, the RWPS model is not a dual-process model in the same sense as other dual process model. Instead, here, the thrust is on when the brain is receptive or not receptive to certain kinds of internal and external stimuli that can influence problem solving. Thus, while the modes may be serial with respect to a certain problem, it does not preclude the possibility of serial and parallel thinking processes that might be involved within these modes.
5.3.2. Event-driven transitions
The model requires an event (defocusing or focusing) to transition from one mode to another. After all why else would a problem that is successfully being resolved in the focused mode (toward completion) need to necessarily be transferred to defocused mode? These events are interpreted as conflicts in the brain and therefore the mode-switching is enabled by the saliency network and the ACC. Thus, the model predicts that there can be no transition from one mode to another without an event. This is a bit circular, as an event is really what triggers the transition in the first place. But, here I am suggesting that an external or internal cue triggered event is what drives the transition, and that transitions cannot happen organically without such an event. In some sense, the argument is that the transition is discontinuous, rather than a smooth one. Mind-wandering is good example of when we might drift into defocused mode, which I suggest is an example of an internally driven event caused by an alternative thought that takes attention away from the problem.
A model assumption underlying RWPS is that events such as impasses have a similar effect to other events such as distraction or mind wandering. Thus, it is crucial to be able to establish that there exists of class of such events and they have a shared effect on RWPS, which is to switch attentional modes.
5.3.3. Focused mode completion
The model also predicts that problems cannot be solved (i.e., completed) within the defocused mode. A problem can be considered solved when a goal is reached. However, if a goal is reached and a problem is completed in the defocused mode, then there must have not been any converging event or coherence of problem elements. While it is possible that the solver arbitrarily arrived at the goal in a diffused problem space and without conscious awareness of completing the task or even any converging event or problem recompiling, it appears somewhat unlikely. It is true that there are many tasks that we complete without actively thinking about it. We do not think about what foot to place in front of another while walking, but this is not an instance of problem solving. Instead, this is an instance of unconscious task completion.
5.3.4. Restructuring required
The model predicts that a problem cannot return to a focused mode without some amount of restructuring. That is, once defocused, the problem is essentially never the same again. The problem elements begin interacting with other internally and externally-generated items, which in turn become absorbed into the problem representation. This prediction can potentially be tested by establishing some preliminary knowledge, and then showing one group of subjects the same knowledge as before, while showing the another group of subjects different stimuli. If the model's predictions hold, the problem representation will be restructured in some way for both groups.
There are numerous other such predictions, which are beyond the scope of this paper. One of the biggest challenges then becomes evaluating the model to set up suitable experiments aimed at testing the predictions and falsifying the theory, which I address next.
6. Experimental challenges and paradigms
One of challenges in evaluating the RWPS is that real world factors cannot realistically be accounted for and sufficiently controlled within a laboratory environment. So, how can one controllably test the various predictions and model assumptions of “real world” problem solving, especially given that by definition RWPS involves the external environment and unconscious processing? At the expense of ecological validity, much of insight problem solving research has employed an experimental paradigm that involves providing participants single instances of suitably difficult problems as stimuli and observing various physiological, neurological and behavioral measures. In addition, through verbal protocols, experimenters have been able to capture subjective accounts and problem solving processes that are available to the participants' conscious. These experiments have been made more sophisticated through the use of timed-hints and/or distractions. One challenge with this paradigm has been the selection of a suitable set of appropriately difficult problems. The classic insight problems (e.g., Nine-dot, eight-coin) can be quite difficult, requiring complicated problem solving processes, and also might not generalize to other problems or real world problems. Some in the insight research community have moved in the direction of verbal tasks (e.g., riddles, anagrams, matchstick rebus, remote associates tasks, and compound remote associates tasks). Unfortunately, these puzzles, while providing a great degree of controllability and repeatability, are even less realistic. These problems are not entirely congruent with the kinds of problems that humans are solving every day.
The other challenge with insight experiments is the selection of appropriate performance and process tracking measures. Most commonly, insight researchers use measures such as time to solution, probability of finding solution, and the like for performance measures. For process tracking, verbal protocols, coded solution attempts, and eye tracking are increasingly common. In neuroscientific studies of insight various neurological measures using functional magnetic resonance imaging (fMRI), electroencephalography (EEGs), transcranial direct current stimulation (tDCS), and transcranial magnetic stimulation (tMS) are popular and allow for spatially and temporally localizing an insight event.
Thus, the challenge for RWPS is two-fold: (1) selection of stimuli (real world problems) that are generalizable, and (2) selection of measures (or a set of measures) that can capture key aspects of the problem solving process. Unfortunately, these two challenges are somewhat at odds with each other. While fMRI and various neuroscientific measures can capture the problem solving process in real time, it is practically difficult to provide participants a realistic scenario while they are laying flat on their back in an fMRI machine and allowed to move nothing more than a finger. To begin addressing this conundrum, I suggest returning to object manipulation problems (not all that different from those originally introduced by Maier and Duncker nearly a century ago), but using modern computing and user-interface technologies.
One pseudo-realistic approach is to generate challenging object manipulation problems in Virtual Reality (VR). VR has been used to describe 3-D environment displays that allows participants to interact with artificially projected, but experientially realistic scenarios. It has been suggested that virtual environments (VE) invoke the same cognitive modules as real equivalent environmental experience (Foreman, 2010 ). Crucially, since VE's can be scaled and designed as desired, they provide a unique opportunity to study pseudo-RWPS. However, a VR-based research approach has its limitations, one of which is that it is nearly impossible to track participant progress through a virtual problem using popular neuroscientific measures such as fMRI because of the limited mobility of connected participants.
Most of the studies cited in this paper utilized an fMRI-based approach in conjunction with a verbal or visual task involving problem-solving or creative thinking. Very few, if any, studies involved the use physical manipulation, and those physical manipulations were restricted to limited finger movements. Thus, another pseudo-realistic approach is allowing subjects to teleoperate robotic arms and legs from inside the fMRI machine. This paradigm has seen limited usage in psychology and robotics, in studies focused on Human-Robot interaction (Loth et al., 2015 ). It could be an invaluable tool in studying real-time dynamic problem-solving through the control of a robotic arm. In this paradigm a problem solving task involving physical manipulation is presented to the subject via the cameras of a robot. The subject (in an fMRI) can push buttons to operate the robot and interact with its environment. While the subjects are not themselves moving, they can still manipulate objects in the real world. What makes this paradigm all the more interesting is that the subject's manipulation-capabilities can be systematically controlled. Thus, for a particular problem, different robotic perceptual and manipulation capabilities can be exposed, allowing researchers to study solver-problem dynamics in a new way. For example, even simple manipulation problems (e.g., re-arranging and stacking blocks on a table) can be turned into challenging problems when the robotic movements are restricted. Here, the problem space restrictions are imposed not necessarily on the underlying problem, but on the solver's own capabilities. Problems of this nature, given their simple structure, may enable studying everyday practical creativity without the burden of devising complex creative puzzles. Crucial to note, both these pseudo-realistic paradigms proposed demonstrate a tight interplay between the solver's own capabilities and their environment.
7. Conclusion
While the neural basis for problem-solving, creativity and insight have been studied extensively in the past, there is still a lack of understanding of the role of the environment in informing the problem-solving process. Current research has primarily focused on internally-guided mental processes for idea generation and evaluation. However, the type of real world problem-solving (RWPS) that is often considered a hallmark of human intelligence has involved both a dynamic interaction with the environment and the ability to handle intervening and interrupting events. In this paper, I have attempted to synthesize the literature into a unified theory of RWPS, with a specific focus on ways in which the environment can help problem-solve and the key neural networks involved in processing and utilizing relevant and useful environmental information. Understanding the neural basis for RWPS will allow us to be better situated to solve difficult problems. Moreover, for researchers in computer science and artificial intelligence, clues into the neural underpinnings of the computations taking place during creative RWPS, can inform the design the next generation of helper and exploration robots which need these capabilities in order to be resourceful and resilient in the open-world.
Author contributions
The author confirms being the sole contributor of this work and approved it for publication.
Conflict of interest statement
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Acknowledgments
I am indebted to Professor Matthias Scheutz, Professor Elizabeth Race, Professor Ayanna Thomas, and Professor. Shaun Patel for providing guidance with the research and the manuscript. I am also grateful for the facilities provided by Tufts University, Medford, MA, USA.
1 My intention is not to ignore the benefits of a concentrated internal thought process which likely occurred as well, but merely to acknowledge the possibility that the environment might have also helped.
2 The research in insight does extensively use “hints” which are, arguably, a form of external influence. But these hints are highly targeted and might not be available in this explicit form when solving problems in the real world.
3 The accuracy of these accounts has been placed in doubt. They often are recounted years later, with inaccuracies, and embellished for dramatic effect.
4 I use the term “agent” to refer to the problem-solver. The term agent is more general than “creature” or “person” or “you" and is intentionally selected to broadly reference humans, animals as well as artificial agents. I also selectively use the term “solver.”
Funding. The research for this Hypothesis/Theory Article was funded by the authors private means. Publication costs will be covered by my institution: Tufts University, Medford, MA, USA.
- Abraham A. (2013). The promises and perils of the neuroscience of creativity . Front. Hum. Neurosci. 7 :246. 10.3389/fnhum.2013.00246 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Anderson J. R., Fincham J. M. (2014). Discovering the sequential structure of thought . Cogn. Sci. 38 , 322–352. 10.1111/cogs.12068 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Anderson J. R., Seung H., Fincham J. M. (2014). Neuroimage discovering the structure of mathematical problem solving . Neuroimage 97 , 163–177. 10.1016/j.neuroimage.2014.04.031 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Ash I. K., Wiley J. (2006). The nature of restructuring in insight: an individual-differences approach . Psychon. Bull. Rev. 13 , 66–73. 10.3758/BF03193814 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Barbey A. K., Barsalou L. W. (2009). Reasoning and problem solving : models , in Encyclopedia of Neuroscience , ed Squire L. (Oxford: Academic Press; ), 35–43. [ Google Scholar ]
- Barbey A. K., Krueger F., Grafman J. (2009). Structured event complexes in the medial prefrontal cortex support counterfactual representations for future planning . Philos. Trans. R. Soc. Lond. B Biol. Sci. 364 , 1291–1300. 10.1098/rstb.2008.0315 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Beaty R. E., Benedek M., Silvia P. J., Schacter D. L. (2016). Creative cognition and brain network dynamics . Trends Cogn. Sci. 20 , 87–95. 10.1016/j.tics.2015.10.004 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Beaty R. E., Benedek M., Wilkins R. W., Jauk E., Fink A., Silvia P. J., et al.. (2014). Creativity and the default network: a functional connectivity analysis of the creative brain at rest . Neuropsychologia 64 , 92–98. 10.1016/j.neuropsychologia.2014.09.019 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Benedek M., Jauk E., Beaty R. E., Fink A., Koschutnig K., Neubauer A. C. (2016). Brain mechanisms associated with internally directed attention and self-generated thought . Sci. Rep. 6 :22959. 10.1038/srep22959 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Benedek M., Jauk E., Fink A., Koschutnig K., Reishofer G., Ebner F., et al.. (2014). To create or to recall? Neural mechanisms underlying the generation of creative new ideas . Neuroimage 88 , 125–133. 10.1016/j.neuroimage.2013.11.021 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Boccia M., Piccardi L., Palermo L., Nori R., Palmiero M. (2015). Where do bright ideas occur in ourbrain? Meta-analytic evidence from neuroimaging studies of domain-specific creativity . Front. Psychol. 6 :1195. 10.3389/fpsyg.2015.01195 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Brandi M. l., Wohlschläger A., Sorg C., Hermsdörfer J. (2014). The neural correlates of planning and executing actual tool use . J. Neurosci. 34 , 13183–13194. 10.1523/JNEUROSCI.0597-14.2014 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Cass S. (2005). Apollo 13, we have a solution , in IEEE Spectrum On-line, 04 , 1. Available online at: https://spectrum.ieee.org/tech-history/space-age/apollo-13-we-have-a-solution
- Chu Y., Macgregor J. N. (2011). Human performance on insight problem solving : a review J. Probl. Solv. 3 , 119–150. 10.7771/1932-6246.1094 [ CrossRef ] [ Google Scholar ]
- Chung H. J., Weyandt L. L. (2014). The physiology of executive functioning , Handbook of Executive Functioning (Springer; ), 13–28. [ Google Scholar ]
- Dandan T., Haixue Z., Wenfu L., Wenjing Y., Jiang Q., Qinglin Z. (2013). Brain activity in using heuristic prototype to solve insightful problems . Behav. Brain Res. 253 , 139–144. 10.1016/j.bbr.2013.07.017 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Danek A. H., Wiley J., Öllinger M. (2016). Solving classical insight problems without aha! experience: 9 dot, 8 coin, and matchstick arithmetic problems . J. Probl. Solv. 9 :4 10.7771/1932-6246.1183 [ CrossRef ] [ Google Scholar ]
- Duncker K. (1945). On problem-solving . Psychol. Monogr. 58 , i–113. [ Google Scholar ]
- Evans J. S., Stanovich K. E. (2013). Dual-process theories of higher cognition: advancing the debate . Perspect. Psychol. Sci. 8 , 223–241. 10.1177/1745691612460685 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Fang X., Zhang Y., Zhou Y., Cheng L., Li J., Wang Y., et al.. (2016). Resting-state coupling between core regions within the central-executive and salience networks contributes to working memory performance . Front. Behav. Neurosci. 10 :27. 10.3389/fnbeh.2016.00027 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Finke R. A., Ward T. B., Smith S. M. (1992). Creative Cognition: Theory, Research, and Applications . Cambridge, MA: MIT press. [ Google Scholar ]
- Fischer J., Mikhael J. G., Tenenbaum J. B., Kanwisher N. (2016). Functional neuroanatomy of intuitive physical inference . Proc. Natl. Acad. Sci. U.S.A. 113 , E5072–E5081. 10.1073/pnas.1610344113 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Fleck J. I. (2008). Working memory demands in insight versus analytic problem solving . Eur. J. Cogn. Psychol. 20 , 139–176. 10.1080/09541440601016954 [ CrossRef ] [ Google Scholar ]
- Foreman N. (2010). Virtual reality in psychology . Themes Sci. Technol. Educ. 2 , 225–252. Available online at: http://earthlab.uoi.gr/theste/index.php/theste/article/view/33 [ Google Scholar ]
- Gabora L. (2016). The neural basis and evolution of divergent and convergent thought . arXiv preprint arXiv:1611.03609 . [ Google Scholar ]
- Gazzaley A., Nobre A. C. (2012). Top-down modulation: bridging selective attention and working memory . Trends Cogn. Sci. 60 , 830–846. 10.1016/j.tics.2011.11.014 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Gilhooly K. J. (2016). Incubation and intuition in creative problem solving . Front. Psychol. 7 :1076. 10.3389/fpsyg.2016.01076 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Guilford J. P. (1962). Creativity: its measurement and development , in A Source Book for Creative Thinking (New York, NY: Charles Scribner's Sons; ), 151–167. [ Google Scholar ]
- Hao X., Cui S., Li W., Yang W., Qiu J., Zhang Q. (2013). Enhancing insight in scientific problem solving by highlighting the functional features of prototypes: an fMRI study . Brain Res. 1534 , 46–54. 10.1016/j.brainres.2013.08.041 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Hayes S. M., Nadel L., Ryan L. (2007). The effect of scene context on episodic object recognition: parahippocampal cortex mediates memory encoding and retrieval success . Hippocampus 9 , 19–22. 10.1002/hipo.20319 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Heinonen J., Numminen J., Hlushchuk Y., Antell H., Taatila V., Suomala J. (2016). Default mode and executive networks areas: association with the serial order in divergent thinking . PLoS ONE 11 :e0162234. 10.1371/journal.pone.0162234 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Horner A. J., Bisby J. A., Bush D., Lin W.-J., Burgess N. (2015). Evidence for holistic episodic recollection via hippocampal pattern completion . Nat. Commun. 6 :7462. 10.1038/ncomms8462 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Isen A. M., Daubman K. A., Nowicki G. P. (1987). Positive affect facilitates creative problem solving . J. Pers. Soc. Psychol. 52 , 1122–1131. 10.1037/0022-3514.52.6.1122 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Jauk E., Benedek M., Neubauer A. C. (2012). Tackling creativity at its roots: evidence for different patterns of EEG alpha activity related to convergent and divergent modes of task processing . Int. J. Psychophysiol. 84 , 219–225. 10.1016/j.ijpsycho.2012.02.012 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Kaplan C. A., Simon H. A. (1990). In search of insight . Cogn. Psychol. 22 , 374–419. [ Google Scholar ]
- Kaufman S. B. (2011). Intelligence and the cognitive unconscious , in The Cambridge Handbook of Intelligence (New York, NY: Cambridge University Press; ), 442–467. [ Google Scholar ]
- Kounios J., Beeman M. (2014). The cognitive neuroscience of insight . Annu. Rev. Psychol. 65 , 71–93. 10.1146/annurev-psych-010213-115154 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Kumaran D., Hassabis D., McClelland J. L. (2016). What learning systems do intelligent agents need? complementary learning systems theory updated . Trends Cogn. Sci. 20 , 512–534. 10.1016/j.tics.2016.05.004 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Loth S., Jettka K., Giuliani M., De Ruiter J. P. (2015). Ghost-in-the-machine reveals human social signals for human–robot interaction . Front. Psychol. 6 :1641. 10.3389/fpsyg.2015.01641 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Lovell J., Kluger J. (2006). Apollo 13 . New York, NY: Houghton Mifflin Harcourt. [ Google Scholar ]
- Luo J., Li W., Qiu J., Wei D., Liu Y., Zhang Q. (2013). Neural basis of scientific innovation induced by heuristic prototype . PLoS ONE 8 :e49231. 10.1371/journal.pone.0049231 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- MacGregor J. N., Ormerod T. C., Chronicle E. P. (2001). Information processing and insight: a process model of performance on the nine-dot and related problems . J. Exp. Psychol. Learn. Mem. Cogn. 27 :176. 10.1037/0278-7393.27.1.176 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Maier N. R. (1930). Reasoning in humans. i. on direction . J. Comp. Psychol. 10 :115. [ Google Scholar ]
- Mason R. A., Just M. A. (2013). Neural representations of physics concepts . Psychol. Sci. 27 , 904–913. 10.1177/0956797616641941 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Mehta R., Zhu R. J. (2009). Blue or red? exploring the effect of color on cognitive task performances . Science 323 , 1226–1229. 10.1126/science.1169144 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Mendelsohn G. (1976). Associative and attentional processes in creative performance . J. Pers. 44 , 341–369. [ Google Scholar ]
- Menon V. (2015). Salience network , in Brain Mapping: An Encyclopedic Reference, Vol. 2 , ed Toga A. W. (London: Academic Press; Elsevier; ), 597–611. [ Google Scholar ]
- Metcalfe J. (1986). Premonitions of insight predict impending error . J. Exp. Psychol. Learn. Mem. Cogn. 12 , 623. [ Google Scholar ]
- Miyake A., Friedman N. P., Emerson M. J., Witzki A. H., Howerter A., Wager T. D. (2000). The unity and diversity of executive functions and their contributions to complex “Frontal Lobe” tasks: a latent variable analysis . Cogn. Psychol. 41 , 49–100. 10.1006/cogp.1999.0734 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Newman S. D., Green S. R. (2015). Complex problem solving . Brain Mapp. 3 , 543–549. 10.1016/B978-0-12-397025-1.00282-7 [ CrossRef ] [ Google Scholar ]
- Ohlsson S. (1992). Information-processing explanations of insight and related phenomena . Adv. Psychol. Think. 1 , 1–44. [ Google Scholar ]
- Öllinger M., Fedor A., Brodt S., Szathmáry E. (2017). Insight into the ten-penny problem: guiding search by constraints and maximization . Psychol. Res. 81 , 925–938. 10.1007/s00426-016-0800-3 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Öllinger M., Jones G., Knoblich G. (2014). The dynamics of search, impasse, and representational change provide a coherent explanation of difficulty in the nine-dot problem . Psychol. Res. 78 , 266–275. 10.1007/s00426-013-0494-8 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Operskalski J. T., Barbey A. K. (2016). Cognitive neuroscience of causal reasoning , in Oxford Handbook of Causal Reasoning , ed Waldmann M. R. (New York, NY: Oxford University Press; ), 217–242. [ Google Scholar ]
- Quilodran R., Rothé M., Procyk E. (2008). Behavioral shifts and action valuation in the anterior cingulate cortex . Neuron 57 , 314–325. 10.1016/j.neuron.2007.11.031 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Ritter S. M., Dijksterhuis A. (2014). Creativity the unconscious foundations of the incubation period . Front. Hum. Neurosci. 8 :215. 10.3389/fnhum.2014.00215 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Robertson S. (2016). Problem Solving: Perspectives from Cognition and Neuroscience . New York, NY: Psychology Press. [ Google Scholar ]
- Salvi C., Bowden E. M. (2016). Looking for creativity: where do we look when we look for new ideas? Front. Psychol. 7 :161. 10.3389/fpsyg.2016.00161 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Sawyer K. (2011). The cognitive neuroscience of creativity: a critical review . Creat. Res. J. 23 , 137–154. 10.1080/10400419.2011.571191 [ CrossRef ] [ Google Scholar ]
- Scimeca J. M., Badre D. (2012). Striatal contributions to declarative memory retrieval Jason . Neuron 75 , 380–392. 10.1016/j.neuron.2012.07.014 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Simone Sandkühler J. B. (2008). Deconstructing insight: EEG correlates of insightful problem solving . PLoS ONE 3 :e1459. 10.1371/journal.pone.0001459 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Simons D. J., Chabris C. F. (1999). Gorillas in our midst: sustained inattentional blindness for dynamic events . Perception 28 , 1059–1074. [ PubMed ] [ Google Scholar ]
- Sowden P. T., Pringle A., Gabora L. (2015). The shifting sands of creative thinking: connections to dual-process theory . Think. Reason. 21 , 40–60. 10.1080/13546783.2014.885464 [ CrossRef ] [ Google Scholar ]
- Sprugnoli G., Rossi S., Emmendorfer A., Rossi A., Liew S.-L., Tatti E., et al. (2017). Neural correlates of Eureka moment . Intelligence 62 , 99–118. 10.1016/j.intell.2017.03.004 [ CrossRef ] [ Google Scholar ]
- Steidle A., Werth L. (2013). Freedom from constraints: darkness and dim illumination promote creativity . J. Environ. Psychol. 35 , 67–80. 10.1016/j.jenvp.2013.05.003 [ CrossRef ] [ Google Scholar ]
- Stocco A., Lebiere C., O'Reilly R. C., Anderson J. R. (2012). Distinct contributions of the caudate nucleus, rostral prefrontal cortex, and parietal cortex to the execution of instructed tasks . Cogn. Affect. Behav. Neurosci. 12 , 611–628. 10.3758/s13415-012-0117-7 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Summerfield J. J., Hassabis D., Maguire E. A. (2010). Differential engagement of brain regions within a corenetwork during scene construction . Neuropsychologia 48 , 1501–1509. 10.1016/j.neuropsychologia.2010.01.022 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Tang Y.-Y., Rothbart M. K., Posner M. I. (2012). Neural Correlates of stablishing, maintaining and switching brain states . Trends Cogn. Sci. 16 , 330–337. 10.1016/j.tics.2012.05.001 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Team M. E. (1970). Mission Operations Report apollo 13 . [ Google Scholar ]
- Thakral P. P., Madore K. P., Schacter D. L. (2017). A role for the left angular gyrus in episodic simulation and memory . J. Neurosci. 37 , 8142–8149. 10.1523/JNEUROSCI.1319-17.2017 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Thomas L. E., Lleras A. (2009). Swinging into thought: directed movement guides insight in problem solving . Psychon. Bull. Rev. 16 , 719–723. 10.3758/PBR.16.4.719 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Vohs K. D., Redden J. P., Rahinel R. (2013). Physical order produces healthy choices, generosity, and conventionality, whereas disorder produces creativity . Psychol. Sci. 24 , 1860–1867. 10.1177/0956797613480186 [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Wegbreit E., Suzuki S., Grabowecky M., Kounios J., Beeman M. (2012). Visual attention modulates insight versus analytic solving of verbal problems . J. Probl. Solv. 144 , 724–732. 10.7771/1932-6246.1127 [ PMC free article ] [ PubMed ] [ CrossRef ] [ Google Scholar ]
- Yang W., Dietrich A., Liu P., Ming D., Jin Y., Nusbaum H. C., et al. (2016). Prototypes are key heuristic information in insight problem solving . Creat. Res. J. 28 , 67–77. 10.1080/10400419.2016.1125274 [ CrossRef ] [ Google Scholar ]
- Yoruk S., Runco M. A. (2014). Neuroscience of divergent thinking . Activ. Nervosa Superior 56 , 1–16. 10.1007/BF03379602 [ CrossRef ] [ Google Scholar ]
- Zabelina D., Saporta A., Beeman M. (2016). Flexible or leaky attention in creative people? Distinct patterns of attention for different types of creative thinking . Mem Cognit . 44 , 488–498. 10.3758/s13421-015-0569-4 [ PubMed ] [ CrossRef ] [ Google Scholar ]
Human Problem Solving
- Living reference work entry
- First Online: 26 September 2024
- Cite this living reference work entry

- Chen Yongming 2 &
- Zhang Kan 2
Human Problem Solving is a monograph of cognitive psychology on information processing orientation of human problem solving, written by American Psychologist Allen Newell and Herbert Alexander Simon Newell, published by Pritz Hall in 1972 (Fig. 1 ). From the mid-1950s, Newell and Simon turned their research interests to problem-solving psychology and sought to construct theories of human psychological behavior via computer programs. They developed and tested a series of simulation programs based on empirical materials. The work was later compiled in this book. Thus, the book covers nearly 17 years of work in their research.

Title page of the original book Human Problem Solving
This is a preview of subscription content, log in via an institution to check access.
Access this chapter
Institutional subscriptions
Further Reading
Yang X-H (1994) History of Chinese psychological thought. Jiangxi Education Publishing House, Nanchang
Google Scholar
Download references
Author information
Authors and affiliations.
Institute of Psychology, Chinese Academy of Sciences (CAS), Beijing, China
Chen Yongming & Zhang Kan
You can also search for this author in PubMed Google Scholar
Corresponding author
Correspondence to Zhang Kan .
Rights and permissions
Reprints and permissions
Copyright information
© 2024 Encyclopedia of China Publishing House
About this entry
Cite this entry.
Yongming, C., Kan, Z. (2024). Human Problem Solving. In: The ECPH Encyclopedia of Psychology. Springer, Singapore. https://doi.org/10.1007/978-981-99-6000-2_1198-1
Download citation
DOI : https://doi.org/10.1007/978-981-99-6000-2_1198-1
Received : 19 August 2024
Accepted : 20 August 2024
Published : 26 September 2024
Publisher Name : Springer, Singapore
Print ISBN : 978-981-99-6000-2
Online ISBN : 978-981-99-6000-2
eBook Packages : Springer Reference Behavioral Science and Psychology Reference Module Humanities and Social Sciences Reference Module Business, Economics and Social Sciences
- Publish with us
Policies and ethics
- Find a journal
- Track your research
- Skip to main content
- Skip to primary sidebar
- Skip to footer
Additional menu
The 5 steps of the solving problem process
August 17, 2023 by MindManager Blog
Whether you run a business, manage a team, or work in an industry where change is the norm, it may feel like something is always going wrong. Thankfully, becoming proficient in the problem solving process can alleviate a great deal of the stress that business issues can create.
Understanding the right way to solve problems not only takes the guesswork out of how to deal with difficult, unexpected, or complex situations, it can lead to more effective long-term solutions.
In this article, we’ll walk you through the 5 steps of problem solving, and help you explore a few examples of problem solving scenarios where you can see the problem solving process in action before putting it to work.
Understanding the problem solving process
When something isn’t working, it’s important to understand what’s at the root of the problem so you can fix it and prevent it from happening again. That’s why resolving difficult or complex issues works best when you apply proven business problem solving tools and techniques – from soft skills, to software.
The problem solving process typically includes:
- Pinpointing what’s broken by gathering data and consulting with team members.
- Figuring out why it’s not working by mapping out and troubleshooting the problem.
- Deciding on the most effective way to fix it by brainstorming and then implementing a solution.
While skills like active listening, collaboration, and leadership play an important role in problem solving, tools like visual mapping software make it easier to define and share problem solving objectives, play out various solutions, and even put the best fit to work.
Before you can take your first step toward solving a problem, you need to have a clear idea of what the issue is and the outcome you want to achieve by resolving it.
For example, if your company currently manufactures 50 widgets a day, but you’ve started processing orders for 75 widgets a day, you could simply say you have a production deficit.
However, the problem solving process will prove far more valuable if you define the start and end point by clarifying that production is running short by 25 widgets a day, and you need to increase daily production by 50%.
Once you know where you’re at and where you need to end up, these five steps will take you from Point A to Point B:
- Figure out what’s causing the problem . You may need to gather knowledge and evaluate input from different documents, departments, and personnel to isolate the factors that are contributing to your problem. Knowledge visualization software like MindManager can help.
- Come up with a few viable solutions . Since hitting on exactly the right solution – right away – can be tough, brainstorming with your team and mapping out various scenarios is the best way to move forward. If your first strategy doesn’t pan out, you’ll have others on tap you can turn to.
- Choose the best option . Decision-making skills, and software that lets you lay out process relationships, priorities, and criteria, are invaluable for selecting the most promising solution. Whether it’s you or someone higher up making that choice, it should include weighing costs, time commitments, and any implementation hurdles.
- Put your chosen solution to work . Before implementing your fix of choice, you should make key personnel aware of changes that might affect their daily workflow, and set up benchmarks that will make it easy to see if your solution is working.
- Evaluate your outcome . Now comes the moment of truth: did the solution you implemented solve your problem? Do your benchmarks show you achieved the outcome you wanted? If so, congratulations! If not, you’ll need to tweak your solution to meet your problem solving goal.
In practice, you might not hit a home-run with every solution you execute. But the beauty of a repeatable process like problem solving is that you can carry out steps 4 and 5 again by drawing from the brainstorm options you documented during step 2.
Examples of problem solving scenarios
The best way to get a sense of how the problem solving process works before you try it for yourself is to work through some simple scenarios.
Here are three examples of how you can apply business problem solving techniques to common workplace challenges.
Scenario #1: Manufacturing
Building on our original manufacturing example, you determine that your company is consistently short producing 25 widgets a day and needs to increase daily production by 50%.
Since you’d like to gather data and input from both your manufacturing and sales order departments, you schedule a brainstorming session to discover the root cause of the shortage.
After examining four key production areas – machines, materials, methods, and management – you determine the cause of the problem: the material used to manufacture your widgets can only be fed into your equipment once the machinery warms up to a specific temperature for the day.
Your team comes up with three possible solutions.
- Leave your machinery running 24 hours so it’s always at temperature.
- Invest in equipment that heats up faster.
- Find an alternate material for your widgets.
After weighing the expense of the first two solutions, and conducting some online research, you decide that switching to a comparable but less expensive material that can be worked at a lower temperature is your best option.
You implement your plan, monitor your widget quality and output over the following week, and declare your solution a success when daily production increases by 100%.
Scenario #2: Service Delivery
Business training is booming and you’ve had to onboard new staff over the past month. Now you learn that several clients have expressed concern about the quality of your recent training sessions.
After speaking with both clients and staff, you discover there are actually two distinct factors contributing to your quality problem:
- The additional conference room you’ve leased to accommodate your expanding training sessions has terrible acoustics
- The AV equipment you’ve purchased to accommodate your expanding workforce is on back-order – and your new hires have been making do without
You could look for a new conference room or re-schedule upcoming training sessions until after your new equipment arrives. But your team collaboratively determines that the best way to mitigate both issues at once is by temporarily renting the high-quality sound and visual system they need.
Using benchmarks that include several weeks of feedback from session attendees, and random session spot-checks you conduct personally, you conclude the solution has worked.
Scenario #3: Marketing
You’ve invested heavily in product marketing, but still can’t meet your sales goals. Specifically, you missed your revenue target by 30% last year and would like to meet that same target this year.
After collecting and examining reams of information from your sales and accounting departments, you sit down with your marketing team to figure out what’s hindering your success in the marketplace.
Determining that your product isn’t competitively priced, you map out two viable solutions.
- Hire a third-party specialist to conduct a detailed market analysis.
- Drop the price of your product to undercut competitors.
Since you’re in a hurry for results, you decide to immediately reduce the price of your product and market it accordingly.
When revenue figures for the following quarter show sales have declined even further – and marketing surveys show potential customers are doubting the quality of your product – you revert back to your original pricing, revisit your problem solving process, and implement the market analysis solution instead.
With the valuable information you gain, you finally arrive at just the right product price for your target market and sales begin to pick up. Although you miss your revenue target again this year, you meet it by the second quarter of the following year.
Kickstart your collaborative brainstorming sessions and try MindManager for free today !
Ready to take the next step?
MindManager helps boost collaboration and productivity among remote and hybrid teams to achieve better results, faster.
Why choose MindManager?
MindManager® helps individuals, teams, and enterprises bring greater clarity and structure to plans, projects, and processes. It provides visual productivity tools and mind mapping software to help take you and your organization to where you want to be.
Explore MindManager
- SUGGESTED TOPICS
- The Magazine
- Newsletters
- Managing Yourself
- Managing Teams
- Work-life Balance
- The Big Idea
- Data & Visuals
- Case Selections
- HBR Learning
- Topic Feeds
- Account Settings
- Email Preferences
Data & Visuals

Partner Center
- Soft skills
- What is a credential?
- Why do a credential?
- How do credentials work?
- Selecting your level
- How will I be assessed?
- Benefits for professionals
- Benefits for organisations
- Benefits for postgraduates
Problem solving techniques: Steps and methods
Posted on May 29, 2019
Constant disruption has become a hallmark of the modern workforce and organisations want problem solving skills to combat this. Employers need people who can respond to change – be that evolving technology, new competitors, different models for doing business, or any of the other transformations that have taken place in recent years.
In addition, problem solving techniques encompass many of the other top skills employers seek . For example, LinkedIn’s list of the most in-demand soft skills of 2019 includes creativity, collaboration and adaptability, all of which fall under the problem-solving umbrella.
Despite its importance, many employees misunderstand what the problem solving method really involves.
What constitutes effective problem solving?
Effective problem solving doesn’t mean going away and coming up with an answer immediately. In fact, this isn’t good problem solving at all, because you’ll be running with the first solution that comes into your mind, which often isn’t the best.
Instead, you should look at problem solving more as a process with several steps involved that will help you reach the best outcome. Those steps are:
- Define the problem
- List all the possible solutions
- Evaluate the options
- Select the best solution
- Create an implementation plan
- Communicate your solution
Let’s look at each step in a little more detail.

1. Define the problem
The first step to solving a problem is defining what the problem actually is – sounds simple, right? Well no. An effective problem solver will take the thoughts of everyone involved into account, but different people might have different ideas on what the root cause of the issue really is. It’s up to you to actively listen to everyone without bringing any of your own preconceived notions to the conversation. Learning to differentiate facts from opinion is an essential part of this process.
An effective problem solver will take the opinions of everyone involved into account
The same can be said of data. Depending on what the problem is, there will be varying amounts of information available that will help you work out what’s gone wrong. There should be at least some data involved in any problem, and it’s up to you to gather as much as possible and analyse it objectively.
2. List all the possible solutions
Once you’ve identified what the real issue is, it’s time to think of solutions. Brainstorming as many solutions as possible will help you arrive at the best answer because you’ll be considering all potential options and scenarios. You should take everyone’s thoughts into account when you’re brainstorming these ideas, as well as all the insights you’ve gleaned from your data analysis. It also helps to seek input from others at this stage, as they may come up with solutions you haven’t thought of.
Depending on the type of problem, it can be useful to think of both short-term and long-term solutions, as some of your options may take a while to implement.

3. Evaluate the options
Each option will have pros and cons, and it’s important you list all of these, as well as how each solution could impact key stakeholders. Once you’ve narrowed down your options to three or four, it’s often a good idea to go to other employees for feedback just in case you’ve missed something. You should also work out how each option ties in with the broader goals of the business.
There may be a way to merge two options together in order to satisfy more people.
4. Select an option
Only now should you choose which solution you’re going to go with. What you decide should be whatever solves the problem most effectively while also taking the interests of everyone involved into account. There may be a way to merge two options together in order to satisfy more people.
5. Create an implementation plan
At this point you might be thinking it’s time to sit back and relax – problem solved, right? There are actually two more steps involved if you want your problem solving method to be truly effective. The first is to create an implementation plan. After all, if you don’t carry out your solution effectively, you’re not really solving the problem at all.
Create an implementation plan on how you will put your solution into practice. One problem solving technique that many use here is to introduce a testing and feedback phase just to make sure the option you’ve selected really is the most viable. You’ll also want to include any changes to your solution that may occur in your implementation plan, as well as how you’ll monitor compliance and success.
6. Communicate your solution
There’s one last step to consider as part of the problem solving methodology, and that’s communicating your solution . Without this crucial part of the process, how is anyone going to know what you’ve decided? Make sure you communicate your decision to all the people who might be impacted by it. Not everyone is going to be 100 per cent happy with it, so when you communicate you must give them context. Explain exactly why you’ve made that decision and how the pros mean it’s better than any of the other options you came up with.
Prove your problem solving skills with Deakin
Employers are increasingly seeking soft skills, but unfortunately, while you can show that you’ve got a degree in a subject, it’s much harder to prove you’ve got proficiency in things like problem solving skills. But this is changing thanks to Deakin’s micro-credentials. These are university-level micro-credentials that provide an authoritative and third-party assessment of your capabilities in a range of areas, including problem solving. Reach out today for more information .
Thank you for visiting nature.com. You are using a browser version with limited support for CSS. To obtain the best experience, we recommend you use a more up to date browser (or turn off compatibility mode in Internet Explorer). In the meantime, to ensure continued support, we are displaying the site without styles and JavaScript.
- View all journals
- Explore content
- About the journal
- Publish with us
- Sign up for alerts
- Perspective
- Published: 25 January 2022
Intelligent problem-solving as integrated hierarchical reinforcement learning
- Manfred Eppe ORCID: orcid.org/0000-0002-5473-3221 1 nAff4 ,
- Christian Gumbsch ORCID: orcid.org/0000-0003-2741-6551 2 , 3 ,
- Matthias Kerzel 1 ,
- Phuong D. H. Nguyen 1 ,
- Martin V. Butz ORCID: orcid.org/0000-0002-8120-8537 2 &
- Stefan Wermter 1
Nature Machine Intelligence volume 4 , pages 11–20 ( 2022 ) Cite this article
5620 Accesses
36 Citations
7 Altmetric
Metrics details
- Cognitive control
- Computational models
- Computer science
- Learning algorithms
- Problem solving
According to cognitive psychology and related disciplines, the development of complex problem-solving behaviour in biological agents depends on hierarchical cognitive mechanisms. Hierarchical reinforcement learning is a promising computational approach that may eventually yield comparable problem-solving behaviour in artificial agents and robots. However, so far, the problem-solving abilities of many human and non-human animals are clearly superior to those of artificial systems. Here we propose steps to integrate biologically inspired hierarchical mechanisms to enable advanced problem-solving skills in artificial agents. We first review the literature in cognitive psychology to highlight the importance of compositional abstraction and predictive processing. Then we relate the gained insights with contemporary hierarchical reinforcement learning methods. Interestingly, our results suggest that all identified cognitive mechanisms have been implemented individually in isolated computational architectures, raising the question of why there exists no single unifying architecture that integrates them. As our final contribution, we address this question by providing an integrative perspective on the computational challenges to develop such a unifying architecture. We expect our results to guide the development of more sophisticated cognitively inspired hierarchical machine learning architectures.
This is a preview of subscription content, access via your institution
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
24,99 € / 30 days
cancel any time
Subscribe to this journal
Receive 12 digital issues and online access to articles
111,21 € per year
only 9,27 € per issue
Buy this article
- Purchase on SpringerLink
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout

Similar content being viewed by others

Phy-Q as a measure for physical reasoning intelligence

Hierarchical motor control in mammals and machines

Hierarchical generative modelling for autonomous robots
Gruber, R. et al. New Caledonian crows use mental representations to solve metatool problems. Curr. Biol. 29 , 686–692 (2019).
Article Google Scholar
Butz, M. V. & Kutter, E. F. How the Mind Comes into Being (Oxford Univ. Press, 2017).
Perkins, D. N. & Salomon, G. in International Encyclopedia of Education (eds. Husen T. & Postelwhite T. N.) 6452–6457 (Pergamon Press, 1992).
Botvinick, M. M., Niv, Y. & Barto, A. C. Hierarchically organized behavior and its neural foundations: a reinforcement learning perspective. Cognition 113 , 262–280 (2009).
Tomov, M. S., Yagati, S., Kumar, A., Yang, W. & Gershman, S. J. Discovery of hierarchical representations for efficient planning. PLoS Comput. Biol. 16 , e1007594 (2020).
Arulkumaran, K., Deisenroth, M. P., Brundage, M. & Bharath, A. A. Deep reinforcement learning: a brief survey. IEEE Signal Process. Mag. 34 , 26–38 (2017).
Li, Y. Deep reinforcement learning: an overview. Preprint at https://arxiv.org/abs/1701.07274 (2018).
Sutton, R. S. & Barto, A. G. Reinforcement Learning : An Introduction 2nd edn (MIT Press, 2018).
Neftci, E. O. & Averbeck, B. B. Reinforcement learning in artificial and biological systems. Nat. Mach. Intell. 1 , 133–143 (2019).
Eppe, M., Nguyen, P. D. H. & Wermter, S. From semantics to execution: integrating action planning with reinforcement learning for robotic causal problem-solving. Front. Robot. AI 6 , 123 (2019).
Oh, J., Singh, S., Lee, H. & Kohli, P. Zero-shot task generalization with multi-task deep reinforcement learning. In Proc. 34th International Conference on Machine Learning ( ICML ) (eds. Precup, D. & Teh, Y. W.) 2661–2670 (PMLR, 2017).
Sohn, S., Oh, J. & Lee, H. Hierarchical reinforcement learning for zero-shot generalization with subtask dependencies. In Proc. 32nd International Conference on Neural Information Processing Systems ( NeurIPS ) (eds Bengio S. et al.) Vol. 31, 7156–7166 (ACM, 2018).
Hegarty, M. Mechanical reasoning by mental simulation. Trends Cogn. Sci. 8 , 280–285 (2004).
Klauer, K. J. Teaching for analogical transfer as a means of improving problem-solving, thinking and learning. Instruct. Sci. 18 , 179–192 (1989).
Duncker, K. & Lees, L. S. On problem-solving. Psychol. Monographs 58, No.5 (whole No. 270), 85–101 https://doi.org/10.1037/h0093599 (1945).
Dayan, P. Goal-directed control and its antipodes. Neural Netw. 22 , 213–219 (2009).
Dolan, R. J. & Dayan, P. Goals and habits in the brain. Neuron 80 , 312–325 (2013).
O’Doherty, J. P., Cockburn, J. & Pauli, W. M. Learning, reward, and decision making. Annu. Rev. Psychol. 68 , 73–100 (2017).
Tolman, E. C. & Honzik, C. H. Introduction and removal of reward, and maze performance in rats. Univ. California Publ. Psychol. 4 , 257–275 (1930).
Google Scholar
Butz, M. V. & Hoffmann, J. Anticipations control behavior: animal behavior in an anticipatory learning classifier system. Adaptive Behav. 10 , 75–96 (2002).
Miller, G. A., Galanter, E. & Pribram, K. H. Plans and the Structure of Behavior (Holt, Rinehart & Winston, 1960).
Botvinick, M. & Weinstein, A. Model-based hierarchical reinforcement learning and human action control. Philos. Trans. R. Soc. B Biol. Sci. 369 , 20130480 (2014).
Wiener, J. M. & Mallot, H. A. ’Fine-to-coarse’ route planning and navigation in regionalized environments. Spatial Cogn. Comput. 3 , 331–358 (2003).
Stock, A. & Stock, C. A short history of ideo-motor action. Psychol. Res. 68 , 176–188 (2004).
Hommel, B., Müsseler, J., Aschersleben, G. & Prinz, W. The theory of event coding (TEC): a framework for perception and action planning. Behav. Brain Sci. 24 , 849–878 (2001).
Hoffmann, J. in Anticipatory Behavior in Adaptive Learning Systems : Foundations , Theories and Systems (eds Butz, M. V. et al.) 44–65 (Springer, 2003).
Kunde, W., Elsner, K. & Kiesel, A. No anticipation-no action: the role of anticipation in action and perception. Cogn. Process. 8 , 71–78 (2007).
Barsalou, L. W. Grounded cognition. Annu. Rev. Psychol. 59 , 617–645 (2008).
Butz, M. V. Toward a unified sub-symbolic computational theory of cognition. Front. Psychol. 7 , 925 (2016).
Pulvermüller, F. Brain embodiment of syntax and grammar: discrete combinatorial mechanisms spelt out in neuronal circuits. Brain Lang. 112 , 167–179 (2010).
Sutton, R. S., Precup, D. & Singh, S. Between MDPs and semi-MDPs: a framework for temporal abstraction in reinforcement learning. Artif. Intell. 112 , 181–211 (1999).
Article MathSciNet MATH Google Scholar
Flash, T. & Hochner, B. Motor primitives in vertebrates and invertebrates. Curr. Opin. Neurobiol. 15 , 660–666 (2005).
Schaal, S. in Adaptive Motion of Animals and Machines (eds. Kimura, H. et al.) 261–280 (Springer, 2006).
Feldman, J., Dodge, E. & Bryant, J. in The Oxford Handbook of Linguistic Analysis (eds Heine, B. & Narrog, H.) 111–138 (Oxford Univ. Press, 2009).
Fodor, J. A. Language, thought and compositionality. Mind Lang. 16 , 1–15 (2001).
Frankland, S. M. & Greene, J. D. Concepts and compositionality: in search of the brain’s language of thought. Annu. Rev. Psychol. 71 , 273–303 (2020).
Hummel, J. E. Getting symbols out of a neural architecture. Connection Sci. 23 , 109–118 (2011).
Haynes, J. D., Wisniewski, D., Gorgen, K., Momennejad, I. & Reverberi, C. FMRI decoding of intentions: compositionality, hierarchy and prospective memory. In Proc. 3rd International Winter Conference on Brain-Computer Interface ( BCI ), 1-3 (IEEE, 2015).
Gärdenfors, P. The Geometry of Meaning : Semantics Based on Conceptual Spaces (MIT Press, 2014).
Book MATH Google Scholar
Lakoff, G. & Johnson, M. Philosophy in the Flesh (Basic Books, 1999).
Eppe, M. et al. A computational framework for concept blending. Artif. Intell. 256 , 105–129 (2018).
Turner, M. The Origin of Ideas (Oxford Univ. Press, 2014).
Deci, E. L. & Ryan, R. M. Self-determination theory and the facilitation of intrinsic motivation. Am. Psychol. 55 , 68–78 (2000).
Friston, K. et al. Active inference and epistemic value. Cogn. Neurosci. 6 , 187–214 (2015).
Berlyne, D. E. Curiosity and exploration. Science 153 , 25–33 (1966).
Loewenstein, G. The psychology of curiosity: a review and reinterpretation. Psychol. Bull. 116 , 75–98 (1994).
Oudeyer, P.-Y., Kaplan, F. & Hafner, V. V. Intrinsic motivation systems for autonomous mental development. In IEEE Transactions on Evolutionary Computation (eds. Coello, C. A. C. et al.) Vol. 11, 265–286 (IEEE, 2007).
Pisula, W. Play and exploration in animals—a comparative analysis. Polish Psychol. Bull. 39 , 104–107 (2008).
Jeannerod, M. Mental imagery in the motor context. Neuropsychologia 33 , 1419–1432 (1995).
Kahnemann, D. & Tversky, A. in Judgement under Uncertainty : Heuristics and Biases (eds Kahneman, D. et al.) Ch. 14, 201–208 (Cambridge Univ. Press, 1982).
Wells, G. L. & Gavanski, I. Mental simulation of causality. J. Personal. Social Psychol. 56 , 161–169 (1989).
Taylor, S. E., Pham, L. B., Rivkin, I. D. & Armor, D. A. Harnessing the imagination: mental simulation, self-regulation and coping. Am. Psychol. 53 , 429–439 (1998).
Kaplan, F. & Oudeyer, P.-Y. in Embodied Artificial Intelligence , Lecture Notes in Computer Science Vol. 3139 (eds Iida, F. et al.) 259–270 (Springer, 2004).
Schmidhuber, J. Formal theory of creativity, fun, and intrinsic motivation. IEEE Trans. Auton. Mental Dev. 2 , 230–247 (2010).
Friston, K., Mattout, J. & Kilner, J. Action understanding and active inference. Biol. Cybern. 104 , 137–160 (2011).
Oudeyer, P.-Y. Computational theories of curiosity-driven learning. In The New Science of Curiosity (ed. Goren Gordon), 43-72 (Nova Science Publishers, 2018); https://arxiv.org/abs/1802.10546
Colombo, M. & Wright, C. First principles in the life sciences: the free-energy principle, organicism and mechanism. Synthese 198 , 3463–3488 (2021).
Article MathSciNet Google Scholar
Huang, Y. & Rao, R. P. Predictive coding. WIREs Cogn. Sci. 2 , 580–593 (2011).
Friston, K. The free-energy principle: a unified brain theory? Nat. Rev. Neurosci. 11 , 127–138 (2010).
Knill, D. C. & Pouget, A. The Bayesian brain: the role of uncertainty in neural coding and computation. Trends Neurosci. 27 , 712–719 (2004).
Clark, A. Whatever next? Predictive brains, situated agents, and the future of cognitive science. Behav. Brain Sci. 36 , 181–204 (2013).
Clark, A. Surfing Uncertainty : Prediction , Action and the Embodied Mind (Oxford Univ. Press, 2016).
Zacks, J. M., Speer, N. K., Swallow, K. M., Braver, T. S. & Reyonolds, J. R. Event perception: a mind/brain perspective. Psychol. Bull. 133 , 273–293 (2007).
Eysenbach, B., Ibarz, J., Gupta, A. & Levine, S. Diversity is all you need: learning skills without a reward function. In International Conference on Learning Representations (ICLR, 2019).
Frans, K., Ho, J., Chen, X., Abbeel, P. & Schulman, J. Meta learning shared hierarchies. In Proc. International Conference on Learning Representations https://openreview.net/pdf?id=SyX0IeWAW (ICLR, 2018).
Heess, N. et al. Learning and transfer of modulated locomotor controllers. Preprint at https://arxiv.org/abs/1610.05182 (2016).
Jiang, Y., Gu, S., Murphy, K. & Finn, C. Language as an abstraction for hierarchical deep reinforcement learning. In Neural Information Processing Systems ( NeurIPS ) (eds. Wallach, H. et al.) 9414–9426 (ACM, 2019).
Li, A. C., Florensa, C., Clavera, I. & Abbeel, P. Sub-policy adaptation for hierarchical reinforcement learning. In Proc. International Conference on Learning Representations https://openreview.net/forum?id=ByeWogStDS (ICLR, 2020).
Qureshi, A. H. et al. Composing task-agnostic policies with deep reinforcement learning. In Proc. International Conference on Learning Representations https://openreview.net/forum?id=H1ezFREtwH (ICLR, 2020).
Sharma, A., Gu, S., Levine, S., Kumar, V. & Hausman, K. Dynamics-aware unsupervised discovery of skills. In Proc. International Conference on Learning Representations https://openreview.net/forum?id=HJgLZR4KvH (ICLR, 2020).
Tessler, C., Givony, S., Zahavy, T., Mankowitz, D. J. & Mannor, S. A deep hierarchical approach to lifelong learning in minecraft. In Proc. 31st AAAI Conference on Artificial Intelligence 1553–1561 (AAAI, 2017).
Vezhnevets, A. et al. Strategic attentive writer for learning macro-actions. In Neural Information Processing Systems ( NIPS ) (eds. Lee, D. et al.) 3494–3502 (NIPS, 2016).
Devin, C., Gupta, A., Darrell, T., Abbeel, P. & Levine, S. Learning modular neural network policies for multi-task and multi-robot transfer. In Proc. International Conference on Robotics and Automation ( ICRA ) (eds. Okamura, A. et al.) 2169–2176 (IEEE, 2017).
Hejna, D. J., Abbeel, P. & Pinto, L. Hierarchically decoupled morphological transfer. In Proc. International Conference on Machine Learning ( ICML ) (eds. Daumé III, H. & Singh, A.) 11409–11420 (PMLR, 2020).
Hamrick, J. B. et al. On the role of planning in model-based deep reinforcement learning. In Proc. International Conference on Learning Representations https://openreview.net/pdf?id=IrM64DGB21 (ICLR, 2021).
Sutton, R. S. Integrated architectures for learning, planning, and reacting based on approximating dynamic programming. In Proc. 7th International Conference on Machine Learning ( ICML ) (eds. Porter, B. W. & Mooney, R. J.) 216–224 (Morgan Kaufmann, 1990).
Nau, D. et al. SHOP2: an HTN planning system. J. Artif. Intell. Res. 20 , 379–404 (2003).
Article MATH Google Scholar
Lyu, D., Yang, F., Liu, B. & Gustafson, S. SDRL: interpretable and data-efficient deep reinforcement learning leveraging symbolic planning. In Proc. AAAI Conference on Artificial Intelligence Vol. 33, 2970–2977 (AAAI, 2019).
Ma, A., Ouimet, M. & Cortés, J. Hierarchical reinforcement learning via dynamic subspace search for multi-agent planning. Auton. Robot. 44 , 485–503 (2020).
Bacon, P.-L., Harb, J. & Precup, D. The option-critic architecture. In Proc. 31st AAAI Conference on Artificial Intelligence 1726–1734 (AAAI, 2017).
Dietterich, T. G. State abstraction in MAXQ hierarchical reinforcement learning. In Advances in Neural Information Processing Systems ( NIPS ) (eds. Solla, S. et al.) Vol. 12, 994–1000 (NIPS, 1999).
Kulkarni, T. D., Narasimhan, K. R., Saeedi, A. & Tenenbaum, J. B. Hierarchical deep reinforcement learning: integrating temporal abstraction and intrinsic motivation. In Neural Information Processing Systems ( NIPS ) (eds. Lee, D. et al.) 3675–3683 (NIPS, 2016).
Shankar, T., Pinto, L., Tulsiani, S. & Gupta, A. Discovering motor programs by recomposing demonstrations. In Proc. International Conference on Learning Representations https://openreview.net/attachment?id=rkgHY0NYwr&name=original_pdf (ICLR, 2020).
Vezhnevets, A. S., Wu, Y. T., Eckstein, M., Leblond, R. & Leibo, J. Z. Options as responses: grounding behavioural hierarchies in multi-agent reinforcement learning. In Proc. International Conference on Machine Learning ( ICML ) (eds. Daumé III, H. & Singh, A.) 9733–9742 (PMLR, 2020).
Ghazanfari, B., Afghah, F. & Taylor, M. E. Sequential association rule mining for autonomously extracting hierarchical task structures in reinforcement learning. IEEE Access 8 , 11782–11799 (2020).
Levy, A., Konidaris, G., Platt, R. & Saenko, K. Learning multi-level hierarchies with hindsight. In Proc. International Conference on Learning Representations https://openreview.net/pdf?id=ryzECoAcY7 (ICLR, 2019).
Nachum, O., Gu, S., Lee, H. & Levine, S. Data-efficient hierarchical reinforcement learning. In Proc. 32nd International Conference on Neural Information Processing Systems (NIPS) (eds. Bengio, S. et al.) 3307–3317 (NIPS, 2018).
Rafati, J. & Noelle, D. C. Learning representations in model-free hierarchical reinforcement learning. In Proc. 33rd AAAI Conference on Artificial Intelligence 10009–10010 (AAAI, 2019).
Röder, F., Eppe, M., Nguyen, P. D. H. & Wermter, S. Curious hierarchical actor-critic reinforcement learning. In Proc. International Conference on Artificial Neural Networks ( ICANN ) (eds. Farkaš, I. et al.) 408–419 (Springer, 2020).
Zhang, T., Guo, S., Tan, T., Hu, X. & Chen, F. Generating adjacency-constrained subgoals in hierarchical reinforcement learning. In Neural Information Processing Systems ( NIPS ) (eds. Larochelle, H. et al.) 21579-21590 (NIPS, 2020).
Lample, G. & Chaplot, D. S. Playing FPS games with deep reinforcement learning. In Proc. 31st AAAI Conference on Artificial Intelligence 2140–2146 (AAAI, 2017).
Vezhnevets, A. S. et al. FeUdal networks for hierarchical reinforcement learning. In Proc. 34th International Conference on Machine Learning ( ICML ) (eds. Precup, D. & Teh, Y. W.) Vol. 70, 3540–3549 (PMLR, 2017).
Wulfmeier, M. et al. Compositional Transfer in Hierarchical Reinforcement Learning. In Robotics: Science and System XVI (RSS) (eds. Toussaint M. et al.) (Robotics: Science and Systems Foundation, 2020); https://arxiv.org/abs/1906.11228
Yang, Z., Merrick, K., Jin, L. & Abbass, H. A. Hierarchical deep reinforcement learning for continuous action control. IEEE Trans. Neural Netw. Learn. Syst. 29 , 5174–5184 (2018).
Toussaint, M., Allen, K. R., Smith, K. A. & Tenenbaum, J. B. Differentiable physics and stable modes for tool-use and manipulation planning. In Proc. Robotics : Science and Systems XIV ( RSS ) (eds. Kress-Gazit, H. et al.) https://ipvs.informatik.uni-stuttgart.de/mlr/papers/18-toussaint-RSS.pdf (Robotics: Science and Systems Foundation, 2018).
Akrour, R., Veiga, F., Peters, J. & Neumann, G. Regularizing reinforcement learning with state abstraction. In Proc. IEEE / RSJ International Conference on Intelligent Robots and Systems ( IROS ) 534–539 (IEEE, 2018).
Schaul, T. & Ring, M. Better generalization with forecasts. In Proc. 23rd International Joint Conference on Artificial Intelligence ( IJCAI ) (ed. Rossi, F.) 1656–1662 (AAAI, 2013).
Colas, C., Akakzia, A., Oudeyer, P.-Y., Chetouani, M. & Sigaud, O. Language-conditioned goal generation: a new approach to language grounding for RL. Preprint at https://arxiv.org/abs/2006.07043 (2020).
Blaes, S., Pogancic, M. V., Zhu, J. J. & Martius, G. Control what you can: intrinsically motivated task-planning agent. Neural Inf. Process. Syst. 32 , 12541–12552 (2019).
Haarnoja, T., Hartikainen, K., Abbeel, P. & Levine, S. Latent space policies for hierarchical reinforcement learning. In Proc. International Conference on Machine Learning ( ICML ) (eds. Dy, J. & Krause, A.) Vol. 4, 2965–2975 (PMLR, 2018).
Rasmussen, D., Voelker, A. & Eliasmith, C. A neural model of hierarchical reinforcement learning. PLoS ONE 12 , e0180234 (2017).
Riedmiller, M. et al. Learning by playing—solving sparse reward tasks from scratch. In Proc. International Conference on Machine Learning ( ICML ) (eds. Dy, J. & Krause, A.) Vol. 10, 6910–6919 (PMLR, 2018).
Yang, F., Lyu, D., Liu, B. & Gustafson, S. PEORL: integrating symbolic planning and hierarchical reinforcement learning for robust decision-making. In Proc. 27th International Joint Conference on Artificial Intelligence ( IJCAI ) (ed. Lang, J.) 4860–4866 (IJCAI, 2018).
Machado, M. C., Bellemare, M. G. & Bowling, M. A Laplacian framework for option discovery in reinforcement learning. In Proc. International Conference on Machine Learning (ICML) (eds. Precup, D. & Teh, Y. W.) Vol. 5, 3567–3582 (PMLR, 2017).
Pathak, D., Agrawal, P., Efros, A. A. & Darrell, T. Curiosity-driven exploration by self-supervised prediction. In Proc. 34th International Conference on Machine Learning ( ICML ) (eds. Precup, D. & Teh, Y. W.) 2778–2787 (PMLR, 2017).
Schillaci, G. et al. Intrinsic motivation and episodic memories for robot exploration of high-dimensional sensory spaces. Adaptive Behav. 29 549–566 (2020).
Colas, C., Fournier, P., Sigaud, O., Chetouani, M. & Oudeyer, P.-Y. CURIOUS: intrinsically motivated modular multi-goal reinforcement learning. In Proc. International Conference on Machine Learning ( ICML ) (eds. Chaudhuri, K. & Salakhutdinov, R.) 1331–1340 (PMLR, 2019).
Hafez, M. B., Weber, C., Kerzel, M. & Wermter, S. Improving robot dual-system motor learning with intrinsically motivated meta-control and latent-space experience imagination. Robot. Auton. Syst. 133 , 103630 (2020).
Yamamoto, K., Onishi, T. & Tsuruoka, Y. Hierarchical reinforcement learning with abductive planning. In Proc. ICML / IJCAI / AAMAS 2018 Workshop on Planning and Learning ( PAL-18 ) (2018).
Wu, B., Gupta, J. K. & Kochenderfer, M. J. Model primitive hierarchical lifelong reinforcement learning . In Proc. International Joint Conference on Autonomous Agents and Multiagent Systems ( AAMAS ) (eds. Agmon, N. et al.) Vol. 1, 34–42 (IFAAMAS, 2019).
Li, Z., Narayan, A. & Leong, T. Y. An efficient approach to model-based hierarchical reinforcement learning. In Proc. 31st AAAI Conference on Artificial Intelligence 3583–3589 (AAAI, 2017).
Hafner, D., Lillicrap, T. & Norouzi, M. Dream to control: learning behaviors by latent imagination. In Proc. International Conference on Learning Representations https://openreview.net/pdf?id=S1lOTC4tDS (ICLR, 2020).
Deisenroth, M. P., Rasmussen, C. E. & Fox, D. Learning to control a low-cost manipulator using data-efficient reinforcement learning. In Robotics : Science and Systems VII ( RSS ) (eds. Durrant-Whyte, H. et al.) 57–64 (Robotics: Science and Systems Foundation, 2011).
Ha, D. & Schmidhuber, J. Recurrent world models facilitate policy evolution. In Proc. 32nd International Conference on Neural Information Processing Systems (NeurIPS) (eds. Bengio, S. et al.) 2455–2467 (NIPS, 2018).
Battaglia, P. W. et al. Relational inductive biases, deep learning and graph networks. Preprint at https://arxiv.org/abs/1806.01261 (2018).
Andrychowicz, M. et al. Hindsight experience replay. In Proc. Neural Information Processing Systems ( NIPS ) (eds. Guyon I. et al.) 5048–5058 (NIPS, 2017); https://papers.nips.cc/paper/7090-hindsight-experience-replay.pdf
Schwartenbeck, P. et al. Computational mechanisms of curiosity and goal-directed exploration. eLife 8 , e41703 (2019).
Haarnoja, T., Zhou, A., Abbeel, P. & Levine, S. Soft actor-critic: off-policy maximum entropy deep reinforcement learning with a stochastic actor. In Proc. International Conference on Machine Learning ( ICML ) (eds. Dy, J. & Krause, A.) 1861–1870 (PMLR, 2018).
Yu, A. J. & Dayan, P. Uncertainty, neuromodulation and attention. Neuron 46 , 681–692 (2005).
Baldwin, D. A. & Kosie, J. E. How does the mind render streaming experience as events? Top. Cogn. Sci. 13 , 79–105 (2021).
Download references
Acknowledgements
We acknowledge funding from the DFG (projects IDEAS, LeCAREbot, TRR169, SPP 2134, RTG 1808 and EXC 2064/1), the Humboldt Foundation and Max Planck Research School IMPRS-IS.
Author information
Manfred Eppe
Present address: Hamburg University of Technology, Hamburg, Germany
Authors and Affiliations
Universität Hamburg, Hamburg, Germany
Manfred Eppe, Matthias Kerzel, Phuong D. H. Nguyen & Stefan Wermter
University of Tübingen, Tübingen, Germany
Christian Gumbsch & Martin V. Butz
Max Planck Institute for Intelligent Systems, Tübingen, Germany
Christian Gumbsch
You can also search for this author in PubMed Google Scholar
Corresponding author
Correspondence to Manfred Eppe .
Ethics declarations
Competing interests.
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Supplementary information.
Supplementary Boxes 1–6 and Table 1.
Rights and permissions
Reprints and permissions
About this article
Cite this article.
Eppe, M., Gumbsch, C., Kerzel, M. et al. Intelligent problem-solving as integrated hierarchical reinforcement learning. Nat Mach Intell 4 , 11–20 (2022). https://doi.org/10.1038/s42256-021-00433-9
Download citation
Received : 18 December 2020
Accepted : 07 December 2021
Published : 25 January 2022
Issue Date : January 2022
DOI : https://doi.org/10.1038/s42256-021-00433-9
Share this article
Anyone you share the following link with will be able to read this content:
Sorry, a shareable link is not currently available for this article.
Provided by the Springer Nature SharedIt content-sharing initiative
This article is cited by
Efficient stacking and grasping in unstructured environments.
- Jinbiao Zhu
Journal of Intelligent & Robotic Systems (2024)
Four attributes of intelligence, a thousand questions
- Matthieu Bardal
- Eric Chalmers
Biological Cybernetics (2023)
An Alternative to Cognitivism: Computational Phenomenology for Deep Learning
- Pierre Beckmann
- Guillaume Köstner
- Inês Hipólito
Minds and Machines (2023)
Quick links
- Explore articles by subject
- Guide to authors
- Editorial policies
Sign up for the Nature Briefing: AI and Robotics newsletter — what matters in AI and robotics research, free to your inbox weekly.

What is problem solving and why is it important?

By Wayne Stottler, Kepner-Tregoe
- Problem Solving & Decision Making Over time, developing and refining problem solving skills provides the ability to solve increasingly complex problems Learn More
For over 60 years, Kepner-Tregoe has been helping companies across industries and geographies to develop and mature their problem-solving skills through our industry-leading approach to training and the implementation of best-practice processes. Considering that problem solving is a part of almost every person’s daily life (both at home and in the workplace), it is surprising how often we are asked to explain what problem solving is and why it is important.
Problem solving is at the core of human evolution. It is the methods we use to understand what is happening in our environment, identify things we want to change and then figure out the things that need to be done to create the desired outcome. Problem solving is the source of all new inventions, social and cultural evolution, and the basis for market based economies. It is the basis for continuous improvement, communication and learning.
If this problem-solving thing is so important to daily life, what is it?
Problem-solving is the process of observing what is going on in your environment; identifying things that could be changed or improved; diagnosing why the current state is the way it is and the factors and forces that influence it; developing approaches and alternatives to influence change; making decisions about which alternative to select; taking action to implement the changes; and observing impact of those actions in the environment.
Each step in the problem-solving process employs skills and methods that contribute to the overall effectiveness of influencing change and determine the level of problem complexity that can be addressed. Humans learn how to solve simple problems from a very early age (learning to eat, make coordinated movements and communicate) – and as a person goes through life, problem-solving skills are refined, matured and become more sophisticated (enabling them to solve more difficult problems).
Problem-solving is important both to individuals and organizations because it enables us to exert control over our environment.
Fixing things that are broken
Some things wear out and break over time, others are flawed from day one. Personal and business environments are full of things, activities, interactions and processes that are broken or not operating in the way they are desired to work. Problem-solving gives us a mechanism for identifying these things, figuring out why they are broken and determining a course of action to fix them.
Addressing risk
Humans have learned to identify trends and developed an awareness of cause-and-effect relationships in their environment. These skills not only enable us to fix things when they break but also anticipate what may happen in the future (based on past experience and current events). Problem-solving can be applied to anticipated future events and used to enable action in the present to influence the likelihood of the event occurring and/or alter the impact if the event does occur.
Improving performance
Individuals and organizations do not exist in isolation in the environment. There is a complex and ever-changing web of relationships that exist and as a result, the actions of one person will often have either a direct impact on others or an indirect impact by changing the environment dynamics. These interdependencies enable humans to work together to solve more complex problems but they also create a force that requires everyone to continuously improve performance to adapt to improvements by others. Problem-solving helps us understand relationships and implement the changes and improvements needed to compete and survive in a continually changing environment.
Seizing opportunity
Problem solving isn’t just about responding to (and fixing) the environment that exists today. It is also about innovating, creating new things and changing the environment to be more desirable. Problem-solving enables us to identify and exploit opportunities in the environment and exert (some level of) control over the future.
Problem solving skills and the problem-solving process are a critical part of daily life both as individuals and organizations. Developing and refining these skills through training, practice and learning can provide the ability to solve problems more effectively and over time address problems with a greater degree of complexity and difficulty. View KT’s Problem Solving workshop known to be the gold standard for over 60 years.

We are experts in:
For inquiries, details, or a proposal!
Subscribe to the KT Newsletter

Global Economies & Markets
Colorado's 'Free River' Loophole: A Simple Fix for Complex Water Woes

Business, Ethics & Society
Plastic with Purpose: Transforming Vietnam's Waste Management

The Challenge Initiative: Expanding Access to Family Planning

Leadership & Management
Most Companies Fail at Transformation. How to Beat the Odds.
Mechanism Design: The Essence of Modern Problem Solving
Insights from

Michael Albert
Gosia glinska.
Most of us can’t imagine life without Google. Whether we’re looking for running shoes or rutabagas, we simply expect that search results—and the sponsored ads that accompany them—will effortlessly populate our screens. But how do those ads, and the order in which they appear, show up in the first place? It turns out they’re there because of a system of high-speed algorithms and automated auctions structured using something called “mechanism design.”
“In today’s information economy, economic interactions are happening not between humans but between algorithms that interact at the frequency of milliseconds, says Darden professor Michael Albert. “Increasingly, both sides of various exchanges are algorithmically driven. Ad auctions are the simplest example—you have bidding agents on one side and the Google AdWords platform on the other.”
Online ad auctions’ structure and their optimal performance are not possible using traditional market design ideas. “The modern system of online advertising and other transformative applications, like kidney exchanges and residency matching for new doctors, are complex, dynamic systems that involve self-interested, strategic agents,” explains Albert. “What made those systems possible is the field of mechanism design.”
What Is Mechanism Design?
Mechanism design sits at the intersection of economics, game theory and artificial intelligence. It takes an engineering approach to solving a wide range of problems where there are interactions among individuals, markets and institutions. Its theoretical foundations were formed in the 1960s by University of Minnesota professor Leonid Hurwicz, who was trying to solve a particular policy problem: How should a planner reach a decision when the quality of the decision relies on private information spread among a number of people? Hurwicz’s rigorous, mathematical analysis of that problem became the core of what is now called mechanism design theory. 1
Among Hurwicz’s insights was the idea that any solution should account for the realities of economic life; namely, people strive to maximize their expected payoff and may withhold disadvantageous information or simply lie, hoping to, for example, lower their taxes or maximize profit. Therefore, any solution should ensure that those who may possess confidential information, which may have a bearing on the decision, are offered incentives to reveal that information.
Mechanism design theory was further developed a few decades later by Roger Myerson at the University of Chicago and Eric Maskin at Harvard. It enhanced our thinking about how to structure a process to achieve a certain goal, such as social welfare or private profit. For example, mechanism design demonstrates why an auction is typically the most efficient way to allocate private goods among a set of potential buyers. For these contributions to mechanism design theory, Hurwicz, Myerson and Maskin shared the 2007 Nobel Memorial Prize in Economic Sciences.
Mechanism Design in the Real World
Darden’s Albert is particularly interested in designing mechanisms to solve big challenges like energy usage and traffic flows. “My research goal,” says Albert, “is to apply a data driven approach to optimize the design of those mechanisms.”
Thanks to automation, participants in various systems (whom economists call “self-interested agents”) increasingly interact electronically, generating volumes of data that can be analyzed and incorporated in to future iterations of the mechanism. According to Albert, repeated electronic interactions provide an opportunity to learn the information necessary to construct the optimal mechanism. “When you combine the growing wealth of available data with algorithmic approaches,” explains Albert, “you can create more efficient systems to allocate and utilize resources.”
Energy usage is a case in point. “The move to a smart grid for the distribution of electricity and a growing number of electric vehicles and other intelligent appliances will create opportunities to significantly affect energy usage through pricing and scheduling,” explains Albert.
The grid can delay c harging of an electric vehicle in order to smooth demand. However, optimally scheduling the charging demand of electric vehicles within the constraints of the grid is fraught with difficulties. As Albert put it, “There’s an incen tiv e issue in c harge scheduling, in that the users of the grid need to report th ei r time constrain ts and desired quan tit y of c harge.” To address that Albert intends to combine sophisticated analysis of energy usage data with targeted mechanism design to incen tivi ze accurate reporting of preferences over c harging.
As the world races to wards automation, th e r e will be more and more opportunities to develop systems that could influence not only energy usage but also purchasing decisions, resource allocation, traffic flows, and health care outcomes. Algorithmic mechanism design, combined with the wealth of data, offers a solution to help optimize those systems.
- 1 Patrick Legros and Estelle Cantillon, “The Nobel Prize: What Is Mechanism Design and Why Does It Matter for Policy-making? Vox CEPR Policy Portal, 18 October 2007. https://voxeu.org/article/nobel-prize-what-mechanism-design-and-why-does-it-matter

Assistant Professor of Business Administration
Assistant Professor Michael Albert teaches Quantitative Analysis courses in Darden’s MBA program, and he has joint appointments in Systems Engineering and Computer Science in the School of Engineering and Applied Sciences (SEAS) at UVA. His research focuses on combining machine learning and algorithmic techniques to automate the design of markets. His work has appeared in leading artificial intelligence and machine learning venues such as the Association for the Advancement of Artificial Intelligence (AAAI) and the International Joint Conference on Artificial Intelligence (IJCAI) .
Prior to joining Darden in 2018, Albert received his PhD in Financial Economics at Duke University’s Fuqua School of Business. He has also worked as a visiting assistant professor of finance at the Ohio State University, as a post-doctoral researcher at the Learning Agents Research Group at the University of Texas at Austin under Peter Stone, and as a post-doctoral researcher in the artificial intelligence group headed by Vincent Conitzer at Duke University.
B.S., James Madison University; M.S., Ph.D., Duke University
READ FULL BIO
Data & Analytics

Data-Driven Streets: How UVA Darden’s Chris Parker is Reshaping Traffic Safety in D.C.

Decoding Decisions: Game Theory, Menus, and the Power of Learning

Understanding Decision-Making: Inherent Risk Preferences

Machine Learning: Prediction, Decision and Action

Marketing & Sales
Too Many Choices: A Model to Predict Open-Ended Consumer Decisions
Newsletter signup.
For the latest Darden thought leadership and practical insights, subscribe to the Darden Ideas to Action e-newsletter. For news about the Darden School, faculty and students, subscribe to The Darden Report e-newsletter.
- Bipolar Disorder
- Therapy Center
- When To See a Therapist
- Types of Therapy
- Best Online Therapy
- Best Couples Therapy
- Managing Stress
- Sleep and Dreaming
- Understanding Emotions
- Self-Improvement
- Healthy Relationships
- Student Resources
- Personality Types
- Guided Meditations
- Verywell Mind Insights
- 2024 Verywell Mind 25
- Mental Health in the Classroom
- Editorial Process
- Meet Our Review Board
- Crisis Support
What Is Problem-Solving Therapy?
Verywell / Madelyn Goodnight
Problem-Solving Therapy Techniques
How effective is problem-solving therapy, things to consider, how to get started.
Problem-solving therapy is a brief intervention that provides people with the tools they need to identify and solve problems that arise from big and small life stressors. It aims to improve your overall quality of life and reduce the negative impact of psychological and physical illness.
Problem-solving therapy can be used to treat depression , among other conditions. It can be administered by a doctor or mental health professional and may be combined with other treatment approaches.
At a Glance
Problem-solving therapy is a short-term treatment used to help people who are experiencing depression, stress, PTSD, self-harm, suicidal ideation, and other mental health problems develop the tools they need to deal with challenges. This approach teaches people to identify problems, generate solutions, and implement those solutions. Let's take a closer look at how problem-solving therapy can help people be more resilient and adaptive in the face of stress.
Problem-solving therapy is based on a model that takes into account the importance of real-life problem-solving. In other words, the key to managing the impact of stressful life events is to know how to address issues as they arise. Problem-solving therapy is very practical in its approach and is only concerned with the present, rather than delving into your past.
This form of therapy can take place one-on-one or in a group format and may be offered in person or online via telehealth . Sessions can be anywhere from 30 minutes to two hours long.
Key Components
There are two major components that make up the problem-solving therapy framework:
- Applying a positive problem-solving orientation to your life
- Using problem-solving skills
A positive problem-solving orientation means viewing things in an optimistic light, embracing self-efficacy , and accepting the idea that problems are a normal part of life. Problem-solving skills are behaviors that you can rely on to help you navigate conflict, even during times of stress. This includes skills like:
- Knowing how to identify a problem
- Defining the problem in a helpful way
- Trying to understand the problem more deeply
- Setting goals related to the problem
- Generating alternative, creative solutions to the problem
- Choosing the best course of action
- Implementing the choice you have made
- Evaluating the outcome to determine next steps
Problem-solving therapy is all about training you to become adaptive in your life so that you will start to see problems as challenges to be solved instead of insurmountable obstacles. It also means that you will recognize the action that is required to engage in effective problem-solving techniques.
Planful Problem-Solving
One problem-solving technique, called planful problem-solving, involves following a series of steps to fix issues in a healthy, constructive way:
- Problem definition and formulation : This step involves identifying the real-life problem that needs to be solved and formulating it in a way that allows you to generate potential solutions.
- Generation of alternative solutions : This stage involves coming up with various potential solutions to the problem at hand. The goal in this step is to brainstorm options to creatively address the life stressor in ways that you may not have previously considered.
- Decision-making strategies : This stage involves discussing different strategies for making decisions as well as identifying obstacles that may get in the way of solving the problem at hand.
- Solution implementation and verification : This stage involves implementing a chosen solution and then verifying whether it was effective in addressing the problem.
Other Techniques
Other techniques your therapist may go over include:
- Problem-solving multitasking , which helps you learn to think clearly and solve problems effectively even during times of stress
- Stop, slow down, think, and act (SSTA) , which is meant to encourage you to become more emotionally mindful when faced with conflict
- Healthy thinking and imagery , which teaches you how to embrace more positive self-talk while problem-solving
What Problem-Solving Therapy Can Help With
Problem-solving therapy addresses life stress issues and focuses on helping you find solutions to concrete issues. This approach can be applied to problems associated with various psychological and physiological symptoms.
Mental Health Issues
Problem-solving therapy may help address mental health issues, like:
- Chronic stress due to accumulating minor issues
- Complications associated with traumatic brain injury (TBI)
- Emotional distress
- Post-traumatic stress disorder (PTSD)
- Problems associated with a chronic disease like cancer, heart disease, or diabetes
- Self-harm and feelings of hopelessness
- Substance use
- Suicidal ideation
Specific Life Challenges
This form of therapy is also helpful for dealing with specific life problems, such as:
- Death of a loved one
- Dissatisfaction at work
- Everyday life stressors
- Family problems
- Financial difficulties
- Relationship conflicts
Your doctor or mental healthcare professional will be able to advise whether problem-solving therapy could be helpful for your particular issue. In general, if you are struggling with specific, concrete problems that you are having trouble finding solutions for, problem-solving therapy could be helpful for you.
Benefits of Problem-Solving Therapy
The skills learned in problem-solving therapy can be helpful for managing all areas of your life. These can include:
- Being able to identify which stressors trigger your negative emotions (e.g., sadness, anger)
- Confidence that you can handle problems that you face
- Having a systematic approach on how to deal with life's problems
- Having a toolbox of strategies to solve the issues you face
- Increased confidence to find creative solutions
- Knowing how to identify which barriers will impede your progress
- Knowing how to manage emotions when they arise
- Reduced avoidance and increased action-taking
- The ability to accept life problems that can't be solved
- The ability to make effective decisions
- The development of patience (realizing that not all problems have a "quick fix")
Problem-solving therapy can help people feel more empowered to deal with the problems they face in their lives. Rather than feeling overwhelmed when stressors begin to take a toll, this therapy introduces new coping skills that can boost self-efficacy and resilience .
Other Types of Therapy
Other similar types of therapy include cognitive-behavioral therapy (CBT) and solution-focused brief therapy (SFBT) . While these therapies work to change thinking and behaviors, they work a bit differently. Both CBT and SFBT are less structured than problem-solving therapy and may focus on broader issues. CBT focuses on identifying and changing maladaptive thoughts, and SFBT works to help people look for solutions and build self-efficacy based on strengths.
This form of therapy was initially developed to help people combat stress through effective problem-solving, and it was later adapted to address clinical depression specifically. Today, much of the research on problem-solving therapy deals with its effectiveness in treating depression.
Problem-solving therapy has been shown to help depression in:
- Older adults
- People coping with serious illnesses like cancer
Problem-solving therapy also appears to be effective as a brief treatment for depression, offering benefits in as little as six to eight sessions with a therapist or another healthcare professional. This may make it a good option for someone unable to commit to a lengthier treatment for depression.
Problem-solving therapy is not a good fit for everyone. It may not be effective at addressing issues that don't have clear solutions, like seeking meaning or purpose in life. Problem-solving therapy is also intended to treat specific problems, not general habits or thought patterns .
In general, it's also important to remember that problem-solving therapy is not a primary treatment for mental disorders. If you are living with the symptoms of a serious mental illness such as bipolar disorder or schizophrenia , you may need additional treatment with evidence-based approaches for your particular concern.
Problem-solving therapy is best aimed at someone who has a mental or physical issue that is being treated separately, but who also has life issues that go along with that problem that has yet to be addressed.
For example, it could help if you can't clean your house or pay your bills because of your depression, or if a cancer diagnosis is interfering with your quality of life.
Your doctor may be able to recommend therapists in your area who utilize this approach, or they may offer it themselves as part of their practice. You can also search for a problem-solving therapist with help from the American Psychological Association’s (APA) Society of Clinical Psychology .
If receiving problem-solving therapy from a doctor or mental healthcare professional is not an option for you, you could also consider implementing it as a self-help strategy using a workbook designed to help you learn problem-solving skills on your own.
During your first session, your therapist may spend some time explaining their process and approach. They may ask you to identify the problem you’re currently facing, and they’ll likely discuss your goals for therapy .
Keep In Mind
Problem-solving therapy may be a short-term intervention that's focused on solving a specific issue in your life. If you need further help with something more pervasive, it can also become a longer-term treatment option.
Get Help Now
We've tried, tested, and written unbiased reviews of the best online therapy programs including Talkspace, BetterHelp, and ReGain. Find out which option is the best for you.
Shang P, Cao X, You S, Feng X, Li N, Jia Y. Problem-solving therapy for major depressive disorders in older adults: an updated systematic review and meta-analysis of randomized controlled trials . Aging Clin Exp Res . 2021;33(6):1465-1475. doi:10.1007/s40520-020-01672-3
Cuijpers P, Wit L de, Kleiboer A, Karyotaki E, Ebert DD. Problem-solving therapy for adult depression: An updated meta-analysis . Eur Psychiatry . 2018;48(1):27-37. doi:10.1016/j.eurpsy.2017.11.006
Nezu AM, Nezu CM, D'Zurilla TJ. Problem-Solving Therapy: A Treatment Manual . New York; 2013. doi:10.1891/9780826109415.0001
Owens D, Wright-Hughes A, Graham L, et al. Problem-solving therapy rather than treatment as usual for adults after self-harm: a pragmatic, feasibility, randomised controlled trial (the MIDSHIPS trial) . Pilot Feasibility Stud . 2020;6:119. doi:10.1186/s40814-020-00668-0
Sorsdahl K, Stein DJ, Corrigall J, et al. The efficacy of a blended motivational interviewing and problem solving therapy intervention to reduce substance use among patients presenting for emergency services in South Africa: A randomized controlled trial . Subst Abuse Treat Prev Policy . 2015;10(1):46. doi:doi.org/10.1186/s13011-015-0042-1
Margolis SA, Osborne P, Gonzalez JS. Problem solving . In: Gellman MD, ed. Encyclopedia of Behavioral Medicine . Springer International Publishing; 2020:1745-1747. doi:10.1007/978-3-030-39903-0_208
Kirkham JG, Choi N, Seitz DP. Meta-analysis of problem solving therapy for the treatment of major depressive disorder in older adults . Int J Geriatr Psychiatry . 2016;31(5):526-535. doi:10.1002/gps.4358
Garand L, Rinaldo DE, Alberth MM, et al. Effects of problem solving therapy on mental health outcomes in family caregivers of persons with a new diagnosis of mild cognitive impairment or early dementia: A randomized controlled trial . Am J Geriatr Psychiatry . 2014;22(8):771-781. doi:10.1016/j.jagp.2013.07.007
Noyes K, Zapf AL, Depner RM, et al. Problem-solving skills training in adult cancer survivors: Bright IDEAS-AC pilot study . Cancer Treat Res Commun . 2022;31:100552. doi:10.1016/j.ctarc.2022.100552
Albert SM, King J, Anderson S, et al. Depression agency-based collaborative: effect of problem-solving therapy on risk of common mental disorders in older adults with home care needs . The American Journal of Geriatric Psychiatry . 2019;27(6):619-624. doi:10.1016/j.jagp.2019.01.002
By Arlin Cuncic, MA Arlin Cuncic, MA, is the author of The Anxiety Workbook and founder of the website About Social Anxiety. She has a Master's degree in clinical psychology.
- Data Science
- Data Analysis
- Data Visualization
- Machine Learning
- Deep Learning
- Computer Vision
- Artificial Intelligence
- AI ML DS Interview Series
- AI ML DS Projects series
- Data Engineering
- Web Scrapping
Problem Solving in Artificial Intelligence
The reflex agent of AI directly maps states into action. Whenever these agents fail to operate in an environment where the state of mapping is too large and not easily performed by the agent, then the stated problem dissolves and sent to a problem-solving domain which breaks the large stored problem into the smaller storage area and resolves one by one. The final integrated action will be the desired outcomes.
On the basis of the problem and their working domain, different types of problem-solving agent defined and use at an atomic level without any internal state visible with a problem-solving algorithm. The problem-solving agent performs precisely by defining problems and several solutions. So we can say that problem solving is a part of artificial intelligence that encompasses a number of techniques such as a tree, B-tree, heuristic algorithms to solve a problem.
We can also say that a problem-solving agent is a result-driven agent and always focuses on satisfying the goals.
There are basically three types of problem in artificial intelligence:
1. Ignorable: In which solution steps can be ignored.
2. Recoverable: In which solution steps can be undone.
3. Irrecoverable: Solution steps cannot be undo.
Steps problem-solving in AI: The problem of AI is directly associated with the nature of humans and their activities. So we need a number of finite steps to solve a problem which makes human easy works.
These are the following steps which require to solve a problem :
- Problem definition: Detailed specification of inputs and acceptable system solutions.
- Problem analysis: Analyse the problem thoroughly.
- Knowledge Representation: collect detailed information about the problem and define all possible techniques.
- Problem-solving: Selection of best techniques.
Components to formulate the associated problem:
- Initial State: This state requires an initial state for the problem which starts the AI agent towards a specified goal. In this state new methods also initialize problem domain solving by a specific class.
- Action: This stage of problem formulation works with function with a specific class taken from the initial state and all possible actions done in this stage.
- Transition: This stage of problem formulation integrates the actual action done by the previous action stage and collects the final stage to forward it to their next stage.
- Goal test: This stage determines that the specified goal achieved by the integrated transition model or not, whenever the goal achieves stop the action and forward into the next stage to determines the cost to achieve the goal.
- Path costing: This component of problem-solving numerical assigned what will be the cost to achieve the goal. It requires all hardware software and human working cost.

Similar Reads
Please login to comment....
- How to Install & Use Kodi on FireStick
- How to Watch NFL on NFL+ in 2024: A Complete Guide
- Best Smartwatches in 2024: Top Picks for Every Need
- Top Budgeting Apps in 2024
- GeeksforGeeks Practice - Leading Online Coding Platform
Improve your Coding Skills with Practice
What kind of Experience do you want to share?
- For educators
- English (US)
- English (India)
- English (UK)
- Greek Alphabet
This problem has been solved!
You'll get a detailed solution from a subject matter expert that helps you learn core concepts.
Question: (1 point) Note: In this problem, scalars are in Z7, the field of integers modulo 7 .Solve the system of equations represented by the following augmented matrix, withscalars in Z7. If the solution involves parameters, use the provided spaces. If you needfewer parameters than there are spaces, leave the spaces for the unused

We are given an augmented matrix over the field Z 7 , which means all operations are done modulo 7 ....

Not the question you’re looking for?
Post any question and get expert help quickly.
IMAGES
VIDEO
COMMENTS
Finding a suitable solution for issues can be accomplished by following the basic four-step problem-solving process and methodology outlined below. Step. Characteristics. 1. Define the problem. Differentiate fact from opinion. Specify underlying causes. Consult each faction involved for information. State the problem specifically.
7. Solution evaluation. 1. Problem identification. The first stage of any problem solving process is to identify the problem (s) you need to solve. This often looks like using group discussions and activities to help a group surface and effectively articulate the challenges they're facing and wish to resolve.
Problem-solving is a mental process that involves discovering, analyzing, and solving problems. The ultimate goal of problem-solving is to overcome obstacles and find a solution that best resolves the issue. The best strategy for solving a problem depends largely on the unique situation. In some cases, people are better off learning everything ...
Problem-solving involves taking certain steps and using psychological strategies. Learn problem-solving techniques and how to overcome obstacles to solving problems. ... The development of an algorithm to identify high-risk individuals within the children's mental health system. Child Psychiat Human Develop. 2020;51:913-924. doi:10.1007/s10578 ...
Problem solving is the process of achieving a goal by overcoming obstacles, a frequent part of most activities. Problems in need of solutions range from simple personal tasks (e.g. how to turn on an appliance) to complex issues in business and technical fields. ... Complex problem solving: Principles and mechanisms. Hillsdale, N.J.: Lawrence ...
The problem-solving process typically includes the following steps: Identify the issue: Recognize the problem that needs to be solved. Analyze the situation: Examine the issue in depth, gather all relevant information, and consider any limitations or constraints that may be present. Generate potential solutions: Brainstorm a list of possible ...
Step 1 - Define the Problem. The definition of the problem is the first step in effective problem solving. This may appear to be a simple task, but it is actually quite difficult. This is because problems are frequently complex and multi-layered, making it easy to confuse symptoms with the underlying cause.
Problem-solving stands as a fundamental skill, crucial in navigating the complexities of both everyday life and professional environments. Far from merely providing quick fixes, it entails a comprehensive process involving the identification, analysis, and resolution of issues. This multifaceted approach requires an understanding of the problem's nature, the exploration of its various ...
In insight problem-solving, the cognitive processes that help you solve a problem happen outside your conscious awareness. 4. Working backward. Working backward is a problem-solving approach often ...
When we do problem definition well in classic problem solving, we are demonstrating the kind of empathy, at the very beginning of our problem, that design thinking asks us to approach. When we ideate—and that's very similar to the disaggregation, prioritization, and work-planning steps—we do precisely the same thing, and often we use ...
Broadly defined, problem solving is the process of finding solutions to difficult or complex issues. But you already knew that. Understanding problem solving frameworks, however, requires a deeper dive. Think about a recent problem you faced. Maybe it was an interpersonal issue.
Defer or suspend judgement. Focus on "Yes, and…" rather than "No, but…". According to Carella, "Creative problem solving is the mental process used for generating innovative and imaginative ideas as a solution to a problem or a challenge. Creative problem solving techniques can be pursued by individuals or groups.".
The neural mechanisms underlying problem-solving have been extensively studied in the literature, and there is general agreement about the key functional networks and nodes involved in various stages of problem-solving. In addition, there has been a great deal of work in studying the neural basis for creativity and insight problem solving ...
Human Problem Solving is a monograph of cognitive psychology on information processing orientation of human problem solving, written by American Psychologist Allen Newell and Herbert Alexander Simon Newell, published by Pritz Hall in 1972 (Fig. 1).From the mid-1950s, Newell and Simon turned their research interests to problem-solving psychology and sought to construct theories of human ...
The problem solving process typically includes: Pinpointing what's broken by gathering data and consulting with team members. Figuring out why it's not working by mapping out and troubleshooting the problem. Deciding on the most effective way to fix it by brainstorming and then implementing a solution. While skills like active listening ...
From Why Groups Struggle to Solve Problems Together , Nov 07, 2019 Partner Center. Latest Magazine Topics Podcasts ...
Planning skills are vital in order to structure, deliver and follow-through on a problem solving workshop and ensure your solutions are intelligently deployed. Planning skills include the ability to organize tasks and a team, plan and design the process and take into account any potential challenges.
Evaluate the options. Select the best solution. Create an implementation plan. Communicate your solution. Let's look at each step in a little more detail. The first solution you come up with won't always be the best - taking the time to consider your options is an essential problem solving technique. 1.
According to cognitive psychology and related disciplines, the development of complex problem-solving behaviour in biological agents depends on hierarchical cognitive mechanisms. Hierarchical ...
Problem-solving gives us a mechanism for identifying these things, figuring out why they are broken and determining a course of action to fix them. Addressing risk. Humans have learned to identify trends and developed an awareness of cause-and-effect relationships in their environment. These skills not only enable us to fix things when they ...
Mechanism design sits at the intersection of economics, game theory and artificial intelligence. It takes an engineering approach to solving a wide range of problems where there are interactions among individuals, markets and institutions. Its theoretical foundations were formed in the 1960s by University of Minnesota professor Leonid Hurwicz ...
Problem-solving therapy is a brief intervention that provides people with the tools they need to identify and solve problems that arise from big and small life stressors. It aims to improve your overall quality of life and reduce the negative impact of psychological and physical illness. Problem-solving therapy can be used to treat depression ...
study examines this question by designing two contexts: (1) fixing a mechanical device that is broken. or healing a living entity that is sick, in which information on an artifact's causal mechanism, or how. its parts causally interact to produce its function, seems intuitively helpful and (2) selling a device or.
Steps problem-solving in AI: The problem of AI is directly associated with the nature of humans and their activities. So we need a number of finite steps to solve a problem which makes human easy works. These are the following steps which require to solve a problem : Problem definition: Detailed specification of inputs and acceptable system ...
Building on the work design for cognition perspective, the present study aimed at developing and testing a moderated mediation model of problem-solving, in which learning through experimentation serves as a mediating mechanism linking problem-solving with idea generation, and organizational tenure moderates the indirect relationship between problem-solving and idea generation via learning ...
Question: (1 point) Note: In this problem, scalars are in Z7, the field of integers modulo 7 .Solve the system of equations represented by the following augmented matrix, withscalars in Z7. If the solution involves parameters, use the provided spaces. If you needfewer parameters than there are spaces, leave the spaces for the unused
Rainwater harvesting plant to be set up in Sunderbans to solve water scarcity problem With a total capacity of 1,20,000 litre, the plant will cater to about 12,000 people in five villages ... Rs 1,000cr siphoned off in irregularities in public distribution system in Bengal: ED; Harassed first-year PG student of Jadavpur University, 'scared ...