Accessibility Links
- Skip to content
- Skip to search IOPscience
- Skip to Journals list
- Accessibility help
- Accessibility Help
Click here to close this panel.
Purpose-led Publishing is a coalition of three not-for-profit publishers in the field of physical sciences: AIP Publishing, the American Physical Society and IOP Publishing.
Together, as publishers that will always put purpose above profit, we have defined a set of industry standards that underpin high-quality, ethical scholarly communications.
We are proudly declaring that science is our only shareholder.

Multi-UAV Task Assignment Based on Quantum Genetic Algorithm
Wang Zheng Yang 1 and Yan Xin 1
Published under licence by IOP Publishing Ltd Journal of Physics: Conference Series , Volume 1824 , The 2020 International Conference on Artificial Intelligence and Application Technologies (AIAT 2020) 26-29 December 2020, Tokyo, Japan Citation Wang Zheng Yang and Yan Xin 2021 J. Phys.: Conf. Ser. 1824 012010 DOI 10.1088/1742-6596/1824/1/012010
Article metrics
219 Total downloads
Share this article
Author e-mails.
Author affiliations
1 School of Computer Science and Technology, Wuhan University of Technology, Hubei Wuhan 435000, China
Buy this article in print
Multi UAV cooperation is an important application of multi UAV cooperation to complete complex tasks. In the aspect of multi UAV system coordination consists of some problems such as difficult to describe complex tasks, difficult to allocate load balancing, and difficult to model tasks. Therefore, making full use of all UAV resources and reasonable task modeling and task allocation to minimize the resource consumption of UAV system is the core problem of multi UAV cooperation. Task allocation is one of the important links of UAV cooperation, which has an important impact on the overall combat effectiveness of the system. This paper establishes the optimization model of multi UAV cooperative task allocation, and then designed a hybrid task allocation method. Quantum genetic algorithm is used for global task allocation in the initial state, and the grouping optimization strategy of hybrid frog leaping algorithm is used to greatly reduce the overall iteration times of the algorithm; the simulated annealing criterion is used to accept new solutions, which can better maintain the diversity of the population and help to jump out of the local extremum.
Export citation and abstract BibTeX RIS
Content from this work may be used under the terms of the Creative Commons Attribution 3.0 licence . Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
UAV Swarm Task Assignment Method Based on Artificial Gorilla Troops Optimizer
Ieee account.
- Change Username/Password
- Update Address
Purchase Details
- Payment Options
- Order History
- View Purchased Documents
Profile Information
- Communications Preferences
- Profession and Education
- Technical Interests
- US & Canada: +1 800 678 4333
- Worldwide: +1 732 981 0060
- Contact & Support
- About IEEE Xplore
- Accessibility
- Terms of Use
- Nondiscrimination Policy
- Privacy & Opting Out of Cookies
A not-for-profit organization, IEEE is the world's largest technical professional organization dedicated to advancing technology for the benefit of humanity. © Copyright 2024 IEEE - All rights reserved. Use of this web site signifies your agreement to the terms and conditions.
Optimal Task Assignment for UAV Swarm Operations in Hostile Environments
- Original Paper
- Published: 02 September 2020
- Volume 22 , pages 456–467, ( 2021 )
Cite this article

- Jongyun Kim 1 ,
- Hyondong Oh ORCID: orcid.org/0000-0002-1051-9477 1 ,
- Beomyeol Yu 2 &
- Seungkeun Kim 2
1543 Accesses
13 Citations
Explore all metrics
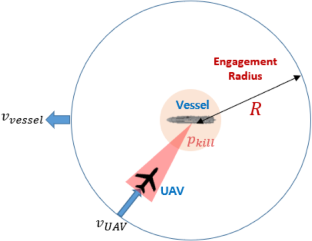
This paper proposes the engagement model and optimal task assignment algorithm for small-UAV swarm operations in hostile maritime environments. To alleviate the complexity of a real engagement environment, several assumptions are made: in the proposed engagement model, a vessel can attack the UAV within a certain range with a constant kill probability rate; and the ability of a vessel to attack UAVs is reduced if the multiple UAVs are involved. The objective function for optimal task assignment is constructed from the engagement model which estimates the total damage to vessels as the engagement outcome. Considering computational time and non-convex nature of the optimization problem, a heuristic approach, SL-PSO (social-learning particle swarm optimization), is adopted to maximize the objective function. In particular, a modified SL-PSO approach is introduced to deal with the optimization problem in a discrete domain. Numerical simulation results for two scenarios are presented to analyze the characteristics of the proposed engagement model and the performance of the optimal task assignment algorithm in the given environment.
This is a preview of subscription content, log in via an institution to check access.
Access this article
Price includes VAT (Russian Federation)
Instant access to the full article PDF.
Rent this article via DeepDyve
Institutional subscriptions
Similar content being viewed by others

Collaborative Defense with Multiple USVs and UAVs Based on Swarm Intelligence
Xing Wu, Yuan Liu, … Yike Guo

A Hybrid Multi-objective Discrete Particle Swarm Optimization Algorithm for Cooperative Air Combat DWTA
Modified particle swarm optimization for bmds interceptor resource planning.
Longyue Li, Fuxian Liu, … Xiaofeng Bie
Otto RP (2016) Small unmanned aircraft systems (SUAS) flight plan: 2016–2036 bridging the gap between tactical and strategic: technical report. Air Force Deputy Chief of Staff, Washington
Google Scholar
Edwards SJ (2005) Swarming and the future of warfare, technical report. Rand Corp, Santa Monica
UVision (2019). https://uvisionuav.com/ . Accessed May 2019
Switchblade (2019). https://www.avinc.com/uas/adc/switchblade . Accessed May 2019
ALPAGU (2019). https://www.stm.com.tr/en/news/announcement/stm-leaves-its-mark-on-idef-2017 . Accessed May 2019
Perdix Project (2019) https://dod.defense.gov/News/News-Releases/News-Release-View/Article/1044811/department-of-defense-announces-successful-micro-drone-demonstration/ . Accessed May 2019
McLemore C, Gaver D, Jacobs P (2016) A model for geographically distributed combat interactions of swarming naval and air forces. Naval Res Logist 63(7):562–576
Article MathSciNet Google Scholar
Barkdoll TC, Gaver DP, Glazebrook KD, Jacobs PA, Posadas S (2002) Suppression of enemy air defenses (SEAD) as an information duel. Naval Res Logist NRL 49(8):723–742
Fan DD, Theodorou E, Reeder J (2017) Evolving cost functions for model predictive control of multi-agent UAV combat swarms. In: Proceedings of the genetic and evolutionary computation conference companion, ACM, pp 55–56
Faied M, Assanein I, Girard A (2009) UAVs dynamic mission management in adversarial environments. Int J Aerosp Eng 2009:1–10
Article Google Scholar
Hou Y, Liang X, He L, Zhang J (2019) Time-coordinated control for unmanned aerial vehicle swarm cooperative attack on ground-moving target. IEEE Access 7:106931–106940
Yoo D-W, Lee C-H, Tahk M-J, Choi H-L (2014) Optimal resource management algorithm for unmanned aerial vehicle missions in hostile territories. Proc Inst Mech Eng Part G J Aerosp Eng 228(12):2157–2167
Jia Z, Yu J, Ai X, Xu X, Yang D (2018) Cooperative multiple task assignment problem with stochastic velocities and time windows for heterogeneous unmanned aerial vehicles using a genetic algorithm. Aerosp Sci Technol 76:112–125
Zhen Z, Xing D, Gao C (2018) Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerosp Sci Technol 76:402–411
Gao C, Zhen Z, Gong H (2016) A self-organized search and attack algorithm for multiple unmanned aerial vehicles. Aerosp Sci Technol 54:229–240
Li P, Duan H (2017) A potential game approach to multiple UAV cooperative search and surveillance. Aerosp Sci Technol 68:403–415
Manyam SG, Casbeer DW, Manickam S (2017) Optimizing multiple UAV cooperative ground attack missions. In: 2017 International conference on unmanned aircraft systems (ICUAS), IEEE, pp 1572–1578
Bellman R (2013) Dynamic programming. Courier Corporation, Chelmsford
MATH Google Scholar
Cheng R, Jin Y (2015) A social learning particle swarm optimization algorithm for scalable optimization. Inf Sci 291:43–60
Eberhart R, Kennedy J (1995) A new optimizer using particle swarm theory. Micro Machine and Human Science, 1995. In: MHS’95. Proceedings of the sixth international symposium on, IEEE, pp 39–43
Kennedy J (2003) Bare bones particle swarms. In: Swarm intelligence symposium. Proceedings of the 2003 IEEE, IEEE, pp 80–87
Kennedy J, Mendes R (2002) Population structure and particle swarm performance. Evolutionary computation. In: Proceedings of the 2002 congress on vol 2, IEEE, pp 1671–1676
Hsieh S-T, Sun T-Y, Liu C-C, Tsai S-J (2009) Efficient population utilization strategy for particle swarm optimizer. IEEE Trans Syst Man Cybern Part B (Cybern) 39(2):444–456
Gong Y-J, Li J-J, Zhou Y, Li Y, Chung HS-H, Shi Y-H, Zhang J (2016) Genetic learning particle swarm optimization. IEEE Trans Cybern 46(10):2277–2290
Pham LV, Dickerson B, Sanders J, Casserly M, Maldonado V, Balbuena D, Graves S, Pandya B (2012) UAV swarm attack: protection system alternatives for destroyers. Ph.D. thesis, Monterey, California: Naval Postgraduate School
Metz S (2000) Armed conflict in the 21st century: the information revolution and post-modern warfare. Strategic Studies Institute, London
Jadoun VK, Gupta N, Niazi K, Swarnkar A (2014) Nonconvex economic dispatch using particle swarm optimization with time varying operators. Adv Electr Eng 2014:1–13
Download references
Acknowledgements
This research has been supported by the Defense Challengeable Future Technology Program of Agency for Defense Development, Republic of Korea, Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (2020R1A6A1A03040570), and a grant to Bio-Mimetic Robot Research Center Funded by Defense Acquisition Program Administration and Agency for Defense Development, Republic of Korea (UD190018ID).
Author information
Authors and affiliations.
School of Mechanical, Aerospace and Nuclear Engineering, Ulsan National Institute of Science and Technology (UNIST), Ulsan, 44919, South Korea
Jongyun Kim & Hyondong Oh
Department of Aerospace Engineering, Chungnam National University, 99 Daehak-ro, Yuseong-gu, Daejeon, 305-764, South Korea
Beomyeol Yu & Seungkeun Kim
You can also search for this author in PubMed Google Scholar
Corresponding author
Correspondence to Hyondong Oh .
Additional information
Publisher's note.
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Reprints and permissions
About this article
Kim, J., Oh, H., Yu, B. et al. Optimal Task Assignment for UAV Swarm Operations in Hostile Environments. Int. J. Aeronaut. Space Sci. 22 , 456–467 (2021). https://doi.org/10.1007/s42405-020-00317-z
Download citation
Received : 01 January 2020
Revised : 09 June 2020
Accepted : 31 July 2020
Published : 02 September 2020
Issue Date : April 2021
DOI : https://doi.org/10.1007/s42405-020-00317-z
Share this article
Anyone you share the following link with will be able to read this content:
Sorry, a shareable link is not currently available for this article.
Provided by the Springer Nature SharedIt content-sharing initiative
- Find a journal
- Publish with us
- Track your research
IMAGES
VIDEO
COMMENTS
Task assignment optimizations are qualitatively compared with various features and characteristics with a comprehensive and comparative discussion. • Finally, critical open issues and research challenges faced during task assignments in multi-UAV systems are summarized and deliberated for further enhancement and improvement. 1.4.
This paper presents a systematical framework to solve the multiple unmanned aerial vehicles (multi-UAV) cooperative task assignment problem. Based on a combinatorial optimization model, it is solved by a digraph-based method and a novel meta-heuristic optimization method, named modified two-part wolf pack search (MTWPS) algorithm. When the number of UAVs/targets is large, in order to reduce ...
This paper proposed an unmanned air vehicle (UAV) swarm task and resource dynamic assignment algorithm based on task sequence mechanism. By establishing a task sequence, each UAV strictly separates the necessary task time and synchronization waiting time. For the found new targets, each UAV quickly determines its available time period. According to the available time and task resources, an ...
UAV swarm applications are critical for the future, and their mission-planning and decision-making capabilities have a direct impact on their performance. However, creating a dynamic and scalable assignment algorithm that can be applied to various groups and tasks is a significant challenge. To address this issue, we propose the Extensible Multi-Agent Deep Deterministic Policy Gradient (Ex ...
Unmanned aerial vehicle (UAV) clusters usually face problems such as complex environments, heterogeneous combat subjects, and realistic interference factors in the course of mission assignment. In order to reduce resource consumption and improve the task execution rate, it is very important to develop a reasonable allocation plan for the tasks. Therefore, this paper constructs a heterogeneous ...
Abstract: Efficient task execution and optimized combat effectiveness can be achieved when a cluster of Unmanned Aerial Vehicles (UAVs) work collaboratively by assigning various tasks to each UAV reasonably. This paper suggests an algorithm for assigning tasks to a cluster of UAVs using an improved version of the Artificial Gorilla Troops Optimizer (GTO) that incorporates multiple strategies.
The multi-UAV task assignment problem in large-scale group-to-group interception scenarios presents challenges in terms of large computational complexity and the lack of accurate evaluation models. This paper proposes an effective evaluation model and hierarchical task assignment framework to address these challenges. The evaluation model incorporates the dynamics constraints specific to fixed ...
Task allocation is one of the important links of UAV cooperation, which has an important impact on the overall combat effectiveness of the system. This paper establishes the optimization model of multi UAV cooperative task allocation, and then designed a hybrid task allocation method. Quantum genetic algorithm is used for global task allocation ...
Abstract. Task assignment of unmanned aerial vehicle (UAV) swarm is to coordinate the matching relationship of multiple tasks between UAVs under many constraints such as flight performance and task load capacity, and to achieve a reasonable assignment of resources to complete the set tasks, while maximizing the balance efficiency and ...
This paper analyzes task assignment for heterogeneous air vehicles using a guaranteed conflict-free assignment algorithm, the Consensus Based Bundle Algorithm (CBBA). We extend this recently proposed algorithm to handle two realistic multi-UAV operational complications. Our first extension accounts for obstacle regions in order to generate collision free paths for UAVs. Our second extension ...
Effective task assignment decisions are paramount for ensuring reliable task execution in multi-UAV systems. However, in the development of feasible plans, challenges stemming from extensive and prolonged task requirements are encountered.
Task assignment is a challenging problem in multiple unmanned aerial vehicle (UAV) missions. In this paper, we focus on the task assignment problem for a UAV swarm saturation attack, in which a deep reinforcement learning (DRL) framework is developed. Specifically, we first construct a mathematical model to formulate the task assignment problem for a UAV swarm saturation attack and consider it ...
Unmanned aerial vehicles, can offer solutions to a lot of problems, making it crucial to research more and improve the task allocation methods used. In this survey, the main approaches used for task allocation in applications involving UAVs are presented as well as the most common applications of UAVs that require the application of task allocation methods. They are followed by the categories ...
UAV Task Assignment Abstract: Unmanned aerial vehicles (UAVs) are becoming vital warfare and homeland security platforms because they have the potential to significantly reduce cost and risk to human life while amplifying warfighter and first-responder capabilities. This article builds on the very active area of planning and control for ...
To verify the feasibility and effectiveness of the UAV task assignment method based on improved potential game, a simulation experiment is designed within the specified task area. Task area is set as 10 km × 10 km × 1 km rectangular space. The task assignment of designing 15 UAVs to carry out cooperative strikes on 5 target missions.
The multi-UAV task assignment problem can generally be modeled as a mixed-integer linear programming (MILP), and commonly used models include vehicle routing problem (VRP) , multiple traveling salesman problem (MTSP) , multiple processors resource allocation (MPRA) , etc. Complicated constraints are embedded in the models to give an accurate ...
Abstract. This chapter presents an effective approach to path planning combined with task assignments for a group of unmanned aerial vehicles (UAVs). Path planning for a UAV is a challenging task. Handling multiple UAVs in dynamic environments makes planning more complicated. On the other hand, coordination and cooperation is very significant ...
When Unmanned Aerial Vehicle (UAV) swarm works together, how to reasonably assign multiple targets and tasks on the ground is a practical problem. To solve this problem, a task assignment method based on Artificial Gorilla Troops Optimizer (GTO) is proposed in this research. The proposed method establishes a Cooperative Multiple Task Assignment Problem (CMTAP) model taking the sum of distance ...
This paper proposes the engagement model and optimal task assignment algorithm for small-UAV swarm operations in hostile maritime environments. To alleviate the complexity of a real engagement environment, several assumptions are made: in the proposed engagement model, a vessel can attack the UAV within a certain range with a constant kill probability rate; and the ability of a vessel to ...