- Who’s Teaching What
- Subject Updates
- MEng program
- Opportunities
- Minor in Computer Science
- Resources for Current Students
- Program objectives and accreditation
- Graduate program requirements
- Admission process
- Degree programs
- Graduate research
- EECS Graduate Funding
- Resources for current students
- Student profiles
- Instructors
- DEI data and documents
- Recruitment and outreach
- Community and resources
- Get involved / self-education
- Rising Stars in EECS
- Graduate Application Assistance Program (GAAP)
- MIT Summer Research Program (MSRP)
- Sloan-MIT University Center for Exemplary Mentoring (UCEM)
- Electrical Engineering
- Computer Science
- Artificial Intelligence + Decision-making
- AI and Society
- AI for Healthcare and Life Sciences
- Artificial Intelligence and Machine Learning
- Biological and Medical Devices and Systems
- Communications Systems
- Computational Biology
- Computational Fabrication and Manufacturing
- Computer Architecture
- Educational Technology
- Electronic, Magnetic, Optical and Quantum Materials and Devices
- Graphics and Vision
- Human-Computer Interaction
- Information Science and Systems
- Integrated Circuits and Systems
- Nanoscale Materials, Devices, and Systems
- Natural Language and Speech Processing
- Optics + Photonics
- Optimization and Game Theory
- Programming Languages and Software Engineering
- Quantum Computing, Communication, and Sensing
- Security and Cryptography
- Signal Processing
- Systems and Networking
- Systems Theory, Control, and Autonomy
- Theory of Computation
- Departmental History
- Departmental Organization
- Visiting Committee
- Explore all research areas
Our research focuses on robotic hardware and algorithms, from sensing to control to perception to manipulation.


Latest news in robotics
A better way to control shape-shifting soft robots.
A new algorithm learns to squish, bend, or stretch a robot’s entire body to accomplish diverse tasks like avoiding obstacles or retrieving items.
QS World University Rankings rates MIT No. 1 in 11 subjects for 2024
The Institute also ranks second in five subject areas.
Three from MIT named 2024-25 Goldwater Scholars
Undergraduates Ben Lou, Srinath Mahankali, and Kenta Suzuki, whose research explores math and physics, are honored for their academic excellence.
Engineering household robots to have a little common sense
With help from a large language model, MIT engineers enabled robots to self-correct after missteps and carry on with their chores.
Department of EECS Announces 2024 Promotions
The Department of Electrical Engineering and Computer Science (EECS) is proud to announce multiple promotions.
Upcoming events
Doctoral thesis: guiding deep probabilistic models.
Institute for Robotics and Intelligent Machines
Research overview.

Foundations of Robotics
Research in the foundational concepts of robotics and automation covers an interdisciplinary range of topics. Computational methodologies, electronics engineering, and physics are all foundational areas of robotics research. Sub-topics include simulation, kinematics, control, optimization, and probabilistic inference.

Field & Service Robotics
Field robots are mobile robots that operate in dynamic environments. These robots are adaptive, and responsive working in variable conditions and territories. Service Robots are fully or partially autonomous and perform tasks that are dangerous, repetitive, or hazardous. This research area also comprises simple and complex industrial robots as well as frontline service robots.

Human-Centered Robotics
Human-centered robotics focuses on robots that interact, assist and cooperate with humans requiring robot operation in human environments and close interaction with non-professional users. The research spans broad areas in human-robot interaction including; assistive and rehabilitation robotics, robotic systems design, wearable robotics, biomedical, surgical and clinical robots.

Manipulation & Locomotion
Robotic manipulation addresses the frameworks of modeling, motion planning, and control of grasp and manipulation of an object for a task. Manipulation research deals not only with the way in which the robot performs, but also the numerous operator-robot interface options. Once a task is defined, robots must be able to navigate its environment successfully. Legged, wheeled, articulated and winged are just a few of the way in robots are constructed for their specific tasks. Many of IRIM’s faculty are working to advance robotic locomotion, creating multi-environment capable robots and bespoke design options.

Safe, Secure, & Resilient Autonomy
Robots given a high degree of autonomy require formal assurances on their abilities and resiliency in the face of disruptions and uncertainty. Obtaining these assurances requires innovations across an interdisciplinary range of topics including control theory, machine learning, optimization, and formal methods for designing cyber-physical intelligent machines. By establishing a rigorous mathematical foundation of guaranteed performance, robots can be confidently deployed in safety-critical settings---for example, alongside humans---or for long durations without operator input such as underwater or in space.

Sensing & Perception
Robotic perception is related to many applications in robotics where sensory data and artificial intelligence/machine learning (AI/ML) techniques are involved. Examples include; object detection, environment representation, scene understanding, human/pedestrian detection, activity recognition, semantic place classification, and object modeling.
IRIM in 1 Minute
If you want to know what amazing robotics research is happening at the Institute for Robotics and Intelligent Machines this 1 minute video gives a great overview!

Having a machine learning agent interact with its environment requires true unsupervised learning, skill acquisition, active learning, exploration and reinforcement, all ingredients of human learning that are still not well understood or exploited through the supervised approaches that dominate deep learning today. Our goal is to improve robotics via machine learning, and improve machine learning via robotics. We foster close collaborations between machine learning researchers and roboticists to enable learning at scale on real and simulated robotic systems.
Recent Publications
Some of our teams.
We're always looking for more talented, passionate people.

Mechatronics and Robotics
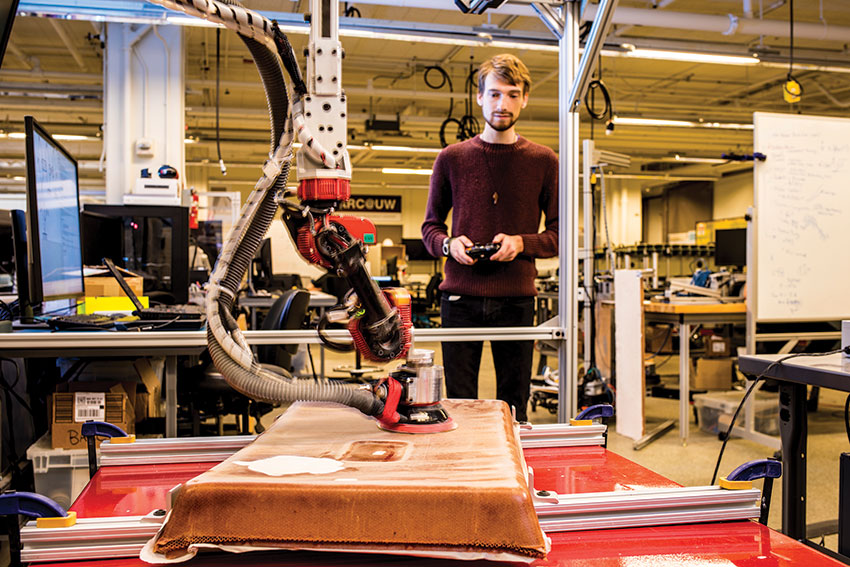
Mechatronics researchers in UW Mechanical Engineering are engaged in an array of groundbreaking projects at the intersections of mechanics, electronics and computing. Much of this work takes place in the area of robotics; our faculty are at the forefront of research in robot-human interaction, nanorobotics, automation and advanced manufacturing. The new devices, technologies, systems and processes being developed in our labs will have lasting impact on industries as diverse as health care, automotive, aeronautics, manufacturing and information technology across the state of Washington and beyond.
Key research areas
- Robotics and human interaction
- Robotics for manufacturing
- Controls and system dynamics
- Sensors and actuators
- Compatible nanorobotics for human health
- Augmented and virtual reality
- Prosthetic devices
- Autonomous systems
Research highlights
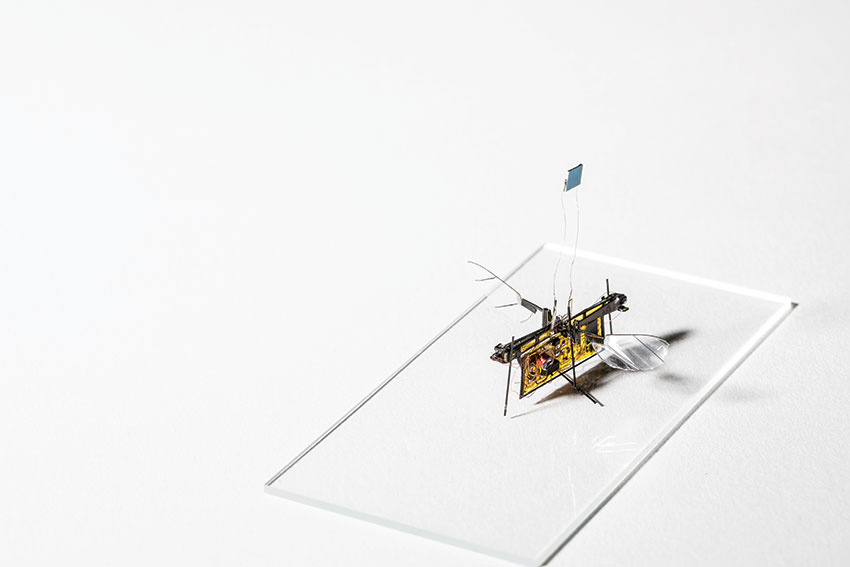
The Autonomous Insect Robotics Laboratory develops technology aimed at insect-sized robots to create tiny robots capable of sensing and performing in the world without a human operator.
ME faculty are advancing the field of photonics through innovations in imaging technologies, optical scanning, molecular imaging, biomedical diagnostics and instrumentation.
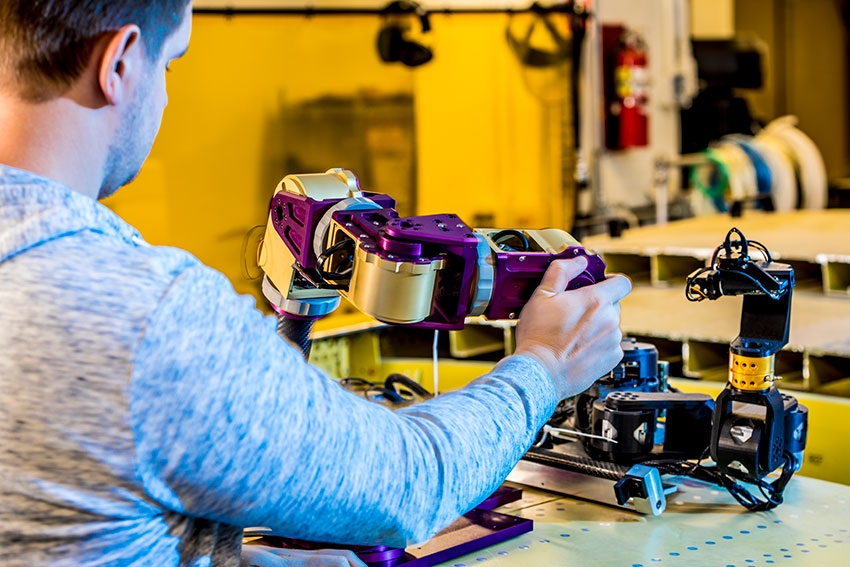
Boeing Advanced Research Collaboration pairs Boeing engineers with students and faculty to develop solutions for Boeing products in the areas of automation, robotics, composites and aircraft assembly.

Focused on amplifying human and robotic interaction, the AMP Lab advances understanding of the dynamics and control of movement to design treatment strategies and assistive technologies that improve function and quality of life.
Award-winning student teams
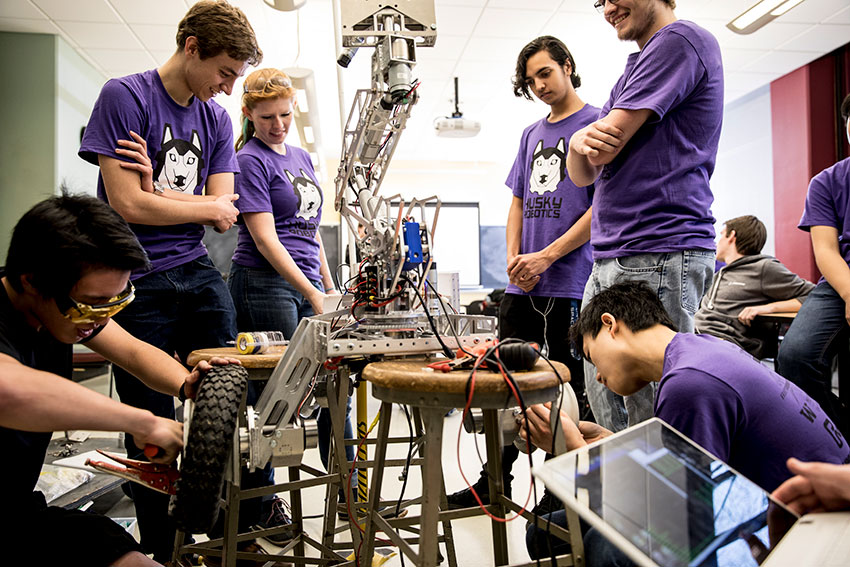
Husky Robotics designs, builds, programs and competes Mars Rovers in simulated missions while providing students with experience in machining, circuit design, coding and project management.

EcoCAR is converting a Chevrolet Camaro into a hybrid electric vehicle for a student competition sponsored by General Motors and the U.S. Department of Energy.

HuskyADAPT works with the community to modify toys and codesign innovations to improve the lives of individuals with disabilities and support inclusive play for all.
Related News
Wed, 02/14/2024 | UW News
UW researchers, including ME and ISE Associate Professor Ashis Banerjee, have developed a method that teaches a low-cost robot to identify objects on a cluttered shelf.
Mon, 07/31/2023
ME Ph.D. candidate Ekta Samani’s research aims to improve visual perception in autonomous robots.
Fri, 07/21/2023 | UW+Amazon Science Hub
ME Associate Professor Ashis Banerjee and ME Assistant Professor Mehmet Kurt received funding for projects addressing challenges in robotics and AI innovation.
Mon, 06/05/2023
PRIDE MONTH
Fall Term 2021 Updates
Michigan Robotics
Work together, create smart machines, serve society.
Focus Areas

Artificial Intelligence

Autonomous & Connected Vehicles

Deep Learning for Robotics

Human-Robot Interaction

Legged Robots & Exoskeletons

Manufacturing Robotics

Motion Planning

Rehabilitation Robotics

Robot Perception & Manipulation

Robot Teams & Swarms

Simultaneous Localization & Mapping (SLAM)

Safe Autonomy
Robotics is poised to revolutionize work, education, and everyday life in much the same way the Internet did over past decades.
Today, some of the most innovative and foundational robotics work is being done at SEAS and across Harvard by collaborative teams of computer scientists, mechanical engineers, electrical engineers, material scientists, applied mathematicians, designers, and medical experts.
Researchers at SEAS benefit from access to in-house resources such as our motional capture labs, flight labs, soft robotics lab, research cores , scientific shops , and the Harvard Move Lab . They have access to the advanced manufacturing capabilities provided by Harvard Center for Nanoscale Research . Some researchers at SEAS work collaboratively with the Harvard Medical School, The Harvard Graduate School of Design, and the Wyss Institute at Harvard .
Robotics research at SEAS spans topics that are both basic and applied. Some areas of focus include:
- soft wearable robots for physical rehabilitation, assistive movement, ergonomic support, and enhanced training.
- medical robots for automated and minimally invasive surgical procedures
- autonomous search and rescue robots to assist first responders in natural or man-made disasters
- automated assembly at scales ranging from micrometer to meter
- bioinspired robots across a range of physical forms
- industrial robots for the automation of manufacturing or shipping
- smart clothing that senses and responds to human needs
- metamaterials that move and transform is novel ways
In Research Focus: Robotics
- Core Faculty
- Affiliated Faculty
- Research Groups, Centers, Initiatives
- Harvard Robotics Clubs
Research Areas
- Bioinspired Robotics and Computing
- Robotics and Control
Featured Stories

Graduate student profile: Gino Domel
Building ‘bots and community
Graduate Student Profile , Materials Science & Mechanical Engineering , Robotics

Senior profile: Lachlain McGranahan
Sailing on the water, studying the whales beneath
Materials Science & Mechanical Engineering , Robotics , Undergraduate Student Profile

Using suction cups inspired by fish to listen in on whale conversations
Project CETI researchers develop gentle, resilient, and reversible tags
Bioengineering , Materials Science & Mechanical Engineering , Robotics
Student Stories

Graduate student profile: Kate Sweeney
Bringing space tech back to earth
Computer Science , Electrical Engineering , Graduate Student Profile , Materials Science & Mechanical Engineering , MS/MBA , Robotics
Alumni Stories

Alumni profile: Bill Peine, Ph.D. ’98
Innovating medical technology wherever he goes
Alumni , Computer Science , Entrepreneurship , Robotics

RightHand Robotics expands to Germany
The company provides integrated robotic piece-picking solutions
Entrepreneurship , Technology , Robotics

Alumni startup opens office in Japan
RightHand Robotics, a startup co-founded by Leif Jentoft, S.M. ’13, Ph.D. ’14 (engineering sciences), has established a new entity in Japan.
Four Key Areas of Development
The Stanford Robotics Center focuses on bridging innovative research and large-scale transformative real-world applications in areas of Field Robotics, Industry/Service, Health/Wellness, and Education/Culture.
The cross-disciplinary research in these areas will contribute a shared core of robotic science and technology providing a foundation to accelerate robotic development.

Robotics is fueling the 4th industrial revolution.

Medical robots are the 'new colleagues' that bring advance to every field of medicine.

Arts, Social Connection, Educational Labs, and Community Outreach

Field Robotics deals with intelligent robotic systems in unstructured and dynamic environments.
- Advisers & Contacts
- Bachelor of Arts & Bachelor of Science in Engineering
- Prerequisites
- Declaring Computer Science for AB Students
- Declaring Computer Science for BSE Students
- Class of '25, '26 & '27 - Departmental Requirements
- Class of 2024 - Departmental Requirements
- COS126 Information
- Important Steps and Deadlines
- Independent Work Seminars
- Guidelines and Useful Information
- Undergraduate Research Topics
- AB Junior Research Workshops
- Undergraduate Program FAQ
- How to Enroll
- Requirements
- Certificate Program FAQ
- Interdepartmental Committee
- Minor Program
- Funding for Student Group Activities
- Mailing Lists and Policies
- Study Abroad
- Jobs & Careers
- Admissions Requirements
- Breadth Requirements
- Pre-FPO Checklist
- FPO Checklist
- M.S.E. Track
- M.Eng. Track
- Departmental Internship Policy (for Master's students)
- General Examination
- Fellowship Opportunities
- Travel Reimbursement Policy
- Communication Skills
- Course Schedule
- Course Catalog
- Research Areas
- Interdisciplinary Programs
- Technical Reports
- Computing Facilities
- Researchers
- Technical Staff
- Administrative Staff
- Graduate Students
- Undergraduate Students
- Graduate Alumni
- Climate and Inclusion Committee
- Resources for Undergraduate & Graduate Students
- Outreach Initiatives
- Resources for Faculty & Staff
- Spotlight Stories
- Job Openings
The goal of robotics research is to create more complex tools that can mimic the actions and intelligence of humans and animals. As robots become more sophisticated, their design, operation, and applications become more complex.
Research in robotics at Princeton spans a wide variety of research areas including perception, control, learning, and planning. Applications span manipulation, locomotion, drones, autonomous vehicles, construction, architecture, and soft robots.
Associated Faculty
- Felix Heide
- Radhika Nagpal
- Szymon Rusinkiewicz
- Automated reasoning
- Cloud and systems
- Computer vision
- Conversational AI
- Information and knowledge management
- Machine learning
- Operations research and optimization
- Quantum technologies
- Search and information retrieval
- Security, privacy, and abuse prevention
- Sustainability
- Publications
- Conferences
- Code and datasets
- Alexa Prize
- Academics at Amazon
- Amazon Research Awards
- Research collaborations
- Autonomous robotics
- Human-robot interaction
- Mobile robotics
- Robotic automation
- Robotic manipulation
Recent publications
- Radar-based localization for autonomous ground vehicles in suburban neighborhoods Andrew Kramer , Chris Heckman Field Robotics 2024 For autonomous ground vehicles (AGVs) deployed in suburban neighborhoods and other human-centric environments the problem of localization remains a fundamental challenge. There are well established methods for localization with GPS, lidar, and cameras. But even in ideal conditions these have limitations. GPS is not always available and is often not accurate enough on its own, visual methods have difficulty Robotics
- Scaling object-centric robotic manipulation with multimodal object identification Chaitanya Mitash , Mostafa Hussein , Jeroen Vanbaar , Vikedo Terhuja , Kapil Katyal ICRA 2024 2024 Robotic manipulation is a key enabler for automation in the fulfillment logistics sector. Such robotic systems require perception and manipulation capabilities to handle a wide variety of objects. Existing systems either operate on a closed set of objects or perform object-agnostic manipulation which lacks the capability for deliberate and reliable manipulation at scale. Object identification (ID) unlocks Computer vision
- Unconstrained model predictive control for robot navigation under uncertainty Senthil Hariharan Arul , Jong Jin Park , Vishnu Prem , Yang Zhang , Dinesh Manocha ICRA 2024 2024 In this paper, we present a probabilistic and unconstrained model predictive control formulation for robot navigation under uncertainty. We present (1) a closed-form approximation of the probability of collision that naturally models the propagation of uncertainty over the planning horizon and is computationally cheap to evaluate, and (2) a collision-cost formulation which provably preserves forward invariance Robotics
- Probabilistic active loop closure for autonomous exploration He Yin , Jong Jin Park , Marcelino Almeida , Martin Labrie , Jim Zamiska , Richard Kim ICRA 2024 2024 When a mobile robot autonomously explores an indoor space to produce a localization and navigation map, it is important to create both a stable pose graph and a high-quality occupancy map that covers all the navigable areas. In this work, we propose a novel probabilistic active loop closure framework which attempts to maximally reduce pose graph uncertainty during exploration and improves occupancy map Robotics
- Planning with purpose: Task-specific trajectory optimization Yinan Pei , Yuri Ivanov IEEE Robotics and Automation Letters 2024 , IROS 2024 2024 In this paper we propose an approach to trajectory planning based on the purpose of the task. For a redundant manipulator, many end effector poses in the task space can be achieved with multiple joint configurations. In planning the motion, we are free to choose the configuration that is optimal for the particular task requirement. Many previous motion-planning approaches have been proposed for the sole Robotics
Related content

Work with us

- Tools & Services
- Chemical, Biological, and Environmental Engineering
- Civil and Construction Engineering
- Electrical Engineering and Computer Science
- Mechanical, Industrial, and Manufacturing Engineering
- Nuclear Science and Engineering
- Biological & Ecological Engineering
- Alumni & Partners
Robotics Area of Research Excellence
The focus of our robotics area is the design, modeling and control of systems that observe, move within, interact with, and act upon their environment. Such systems include mobile robots, micro-aerial vehicles and large active sensor networks. The application domains within this research cluster include bipedal and hexapedal robot locomotion, winged and rotor-based micro-aerial vehicle control, robot navigation, multi-robot coordination and distributed sensor network optimization.
Collaborative Robotics and Intelligent Systems Institute
In 2017, the College of Engineering established the CoRIS (Collaborative Robotics and Intelligent Systems) Institute. The mission of this interdisciplinary institute is to study the theory, design, development and deployment of robots and intelligent systems in both the physical world and virtual environments. Learn more about CoRIS .
Research Areas
- Autonomous robots
- Growing robots
- Human–robot interactions
- Integrated robotic systems
- Learning and communication in multiagent systems
- Legged locomotion
- Micro air vehicle control and coordination
- Mobile robots
- Modeling/optimization for energy conversion and use
- Multi-robot coordination
- Prosthetics
- Snake robots and full-body locomotion
- Soft robotics
- Spiders and spider webs

Ravi Balasubramanian

Belinda Batten

Joseph Davidson


Naomi Fitter

Cindy Grimm

Ross Hatton

Geoff Hollinger

Jonathan Hurst


Kagan Tumer
- Research & Faculty
- Offices & Services
- Information for:
- Faculty & Staff
- News & Events
- Contact & Visit
- A Message from the Chair
- Quick Facts
- Accreditation
- Undergraduate Study
- Prospective Undergraduates
- Degree Programs
- Frequently Asked Questions
- BS Curriculum
- Combined Degrees
- Honors, Electives, and Certificate Programs
- Advising and Forms
- Career Resources
- Student Organizations
- Graduate Study
- Prospective PhD Students
- How To Apply
- Prospective Master's Students
- Graduate Student Resources & Forms
- PhD Curriculum
- Master's Curriculum
- International Students
- Student Awards
- Graduate Student Society (MEGSS)
- Course Listing for Previous Years
- Courses in All Departments
- Core Disciplines
- Advanced Manufacturing
- AI and Design
- Biosystems and Health
- Computational Engineering
- Energy and Sustainability
- Micro/ Nanoengineering
- Robotics and Autonomy
- Affiliated Centers & Institutes
- Innovation & Entrepreneurship
- Core Faculty
- Administrative Faculty
- Faculty of Instruction
- Affiliated Faculty
- Advisory Board
- Faculty Awards & Honors
- Faculty Books
- News Archive
- Summer Short Course: Advanced Technologies and Tribology
- Colloquia & Seminars
- Department Email Groups
- ME Administrative Resources
- Filing Expense Reports
- Staff Resources
- Diversity, Equity, and Inclusion (DEI)
- Diversity, Equity and Inclusion Committee
- Student Groups
- Northwestern Engineering
Research / Areas of Research Robotics and Autonomy
Creating machines that interact with complex environments, make decisions, take action, and collaborate with humans and one another
View robotics and autonomy faculty
Research Area Subtopics

Bio-inspiration, Neuromechanics, and Neuroscience
We study sensorimotor integration in model animal systems to better understand neuromechanics and to derive inspiration for robots. We particularly seek to understand how animals move their bodies and sensory organs in order to execute behaviors, such as prey capture. Model systems include rat whisking and the electrosense of the black ghost knifefish.

Human-machine Systems
We investigate a broad range of topics in human-machine systems including haptic interfaces to virtual environments, haptic feedback on touch surfaces, human-in-the-loop control systems to augment motor learning, human-robot co-adaptation, especially in the context of rehabilitation, and dynamic allocation of autonomy in the context of human-robot teams.

Swarm Robotics and Decentralized Computation
Networked systems often exhibit emergent behavior. In nature, for example, flocks of birds, schools of fish, and swarms of bees all develop cohesive global behavior from purely local interactions. We develop tools to design local control, communication, and estimation laws for individual agents that yield a desired group behavior such as self-assembly or locomotion.

Autonomous Systems
Autonomous systems use sensory data, artificial intelligence, machine learning, and motion planning and control to make real-time decisions about how to act in changing environments. We explore new ways for robots, vehicles, and other powered devices to achieve sophisticated autonomous behaviors, including locomotion on complex terrain, multi-fingered or nonprehensile manipulation, and automation in manufacturing.

Soft Robotics
We develop soft devices and machines with novel bioinspired actuation, perception, control, and power capabilities. This work includes the synthesis and characterization of functional soft, polymeric, and nanoscale materials, the development of novel additive and digital manufacturing methods, and the design of soft robotic structures with embedded sensors, actuators, and control.

Brenna Argall
Associate Professor of Computer Science
Associate Professor of Mechanical Engineering
Associate Professor of Physical Medicine and Rehabilitation
Email Brenna Argall

Jian Cao
Associate Vice President for Research
Cardiss Collins Professor of Mechanical Engineering and (by courtesy) Civil and Environmental Engineering and Materials Science and Engineering
Director, Northwestern Initiative for Manufacturing Science and Innovation (NIMSI)
Email Jian Cao

J. Edward Colgate
Walter P. Murphy Professor of Mechanical Engineering
Email J. Edward Colgate

Kornel Ehmann
Professor Emeritus of Mechanical Engineering
Email Kornel Ehmann

Ping Guo
Email Ping Guo

Mitra Hartmann
Professor of Biomedical Engineering
Professor of Mechanical Engineering
Professor of Computer Science (by courtesy)
Email Mitra Hartmann

Kevin Lynch
Director, Center for Robotics and Biosystems
Email Kevin Lynch

Malcolm MacIver
Email Malcolm MacIver

Todd Murphey
Director of the Master of Science in Robotics Program
Email Todd Murphey

Michael Peshkin
Allen K. and Johnnie Cordell Breed Senior Professor in Design
Email Michael Peshkin

Michael Rubenstein
Director of Graduate Admissions in Computer Science
Email Michael Rubenstein

Ryan Truby
Assistant Professor of Materials Science and Engineering
Assistant Professor of Mechanical Engineering
June and Donald Brewer Junior Professor
Email Ryan Truby
Courtesy Faculty

John Rogers
Louis Simpson and Kimberly Querrey Professor of Materials Science and Engineering, Biomedical Engineering and Neurological Surgery (and by courtesy Electrical and Computer Engineering, Mechanical Engineering, Chemistry and Dermatology)
Director, Querrey Simpson Institute for Bioelectronics
Email John Rogers

Petia Vlahovska
Professor of Engineering Sciences and Applied Mathematics (by courtesy) Mechanical Engineering
Email Petia Vlahovska
More in this section
- MyU : For Students, Faculty, and Staff
Robotics Research Areas
The Minnesota Robotics Institute encompasses several disciplines in departments across the University of Minnesota. The best way to learn about robotics and sensing is being able to work with multiple disciplines and in many mediums. Our core research areas include:
Agriculture and Environmental Monitoring
- Faculty Experts: Volkan Isler , Peter Marchetto , Yuxin Miao , David Mulla , Ce Yang
Computer Vision and Cognition
- Faculty Experts: Changyun Choi , Volkan Isler , Nikolaos Papanikolopoulos , Hyun Soo Park , Catherine Qi Zhao , Karthik Desingh
Artificial Intelligence and Machine Learning
- Faculty Experts: Arindam Banerjee , Changyun Choi , Catherine Qi Zhao , Karthik Desingh
Novel Robots
- Faculty Experts: Juliana Abel , Maria Gini , Brad Holschuh , Timothy Kowalewski , Nikolaos Papanikolopoulos , Junaed Sattar , Karthik Desingh
Estimation and Automated Monitoring
- Faculty Experts: Demoz Gebre-Egziabher , Volkan Isler , Rajesh Rajamani , Stergios Roumeliotis
Medical Robotics and Devices
- Faculty Experts: Will Durfee , Suhasa Kodandaramiah , Tim Kowalewski
Intelligent Transportation Systems
- Faculty Experts: Max Donath , Demoz Gebre-Egzhiaber , Maziar Hemati , Rajesh Rajamani
Manufacturing (Micro and Nano Manufacturing and 3D-printing)
- Faculty Experts: Michael McAlpine , Sang-Hyun Oh , Sarah Swisher , Zhi Yang
- Future undergraduate students
- Future transfer students
- Future graduate students
- Future international students
- Diversity and Inclusion Opportunities
- Learn abroad
- Living Learning Communities
- Mentor programs
- Programs for women
- Student groups
- Visit, Apply & Next Steps
- Information for current students
- Departments and majors overview
- Departments
- Undergraduate majors
- Graduate programs
- Integrated Degree Programs
- Additional degree-granting programs
- Online learning
- Academic Advising overview
- Academic Advising FAQ
- Academic Advising Blog
- Appointments and drop-ins
- Academic support
- Commencement
- Four-year plans
- Honors advising
- Policies, procedures, and forms
- Career Services overview
- Resumes and cover letters
- Jobs and internships
- Interviews and job offers
- CSE Career Fair
- Major and career exploration
- Graduate school
- Collegiate Life overview
- Scholarships
- Diversity & Inclusivity Alliance
- Anderson Student Innovation Labs
- Information for alumni
- Get engaged with CSE
- Upcoming events
- CSE Alumni Society Board
- Alumni volunteer interest form
- Golden Medallion Society Reunion
- 50-Year Reunion
- Alumni honors and awards
- Outstanding Achievement
- Alumni Service
- Distinguished Leadership
- Honorary Doctorate Degrees
- Nobel Laureates
- Alumni resources
- Alumni career resources
- Alumni news outlets
- CSE branded clothing
- International alumni resources
- Inventing Tomorrow magazine
- Update your info
- CSE giving overview
- Why give to CSE?
- College priorities
- Give online now
- External relations
- Giving priorities
- Donor stories
- Impact of giving
- Ways to give to CSE
- Matching gifts
- CSE directories
- Invest in your company and the future
- Recruit our students
- Connect with researchers
- K-12 initiatives
- Diversity initiatives
- Research news
- Give to CSE
- CSE priorities
- Corporate relations
- Information for faculty and staff
- Administrative offices overview
- Office of the Dean
- Academic affairs
- Finance and Operations
- Communications
- Human resources
- Undergraduate programs and student services
- CSE Committees
- CSE policies overview
- Academic policies
- Faculty hiring and tenure policies
- Finance policies and information
- Graduate education policies
- Human resources policies
- Research policies
- Research overview
- Research centers and facilities
- Research proposal submission process
- Research safety
- Award-winning CSE faculty
- National academies
- University awards
- Honorary professorships
- Collegiate awards
- Other CSE honors and awards
- Staff awards
- Performance Management Process
- Work. With Flexibility in CSE
- K-12 outreach overview
- Summer camps
- Outreach events
- Enrichment programs
- Field trips and tours
- CSE K-12 Virtual Classroom Resources
- Educator development
- Sponsor an event
Robotics and Autonomous Systems
Related courses.
Graduate-level ECE courses related to this area (click the RO column to see Major area courses)
ECE Grad Course List >
Robots are evolving from stationary devices that perform manufacturing tasks to mobile, information gathering, computing, and decision making platforms. The autonomous vehicles participating in the DARPA Grand Challenges highlighted the significant progress that has been made in this area and the enormous work that remains to be done. At the University of Michigan, we are exploring the feedback control principles of bipedal robotic locomotion, with the goal of endowing machines with the ability to walk on two legs with the agility of a human. We also use artificial intelligence techniques for dealing with planning and uncertainty, localization and mapping, sensor processing and classification, and continuous learning.
Related Links
Michigan Robotics >
Specialties
- Bipedal Robot Locomotion
- Field Robotics
- Human-Robot Interaction
- Mobile Manipulation
- Prosthetics and Exoskeletons
ECE Faculty
Jason corso, james freudenberg, alfred hero, pei-cheng ku, jing shuang (lisa) li, necmiye ozay, shai revzen, peter seiler, cse faculty, benjamin kuipers, edwin olson, affiliated faculty, dmitry berenson, robert gregg, chad jenkins, anna stefanopoulou, dawn tilbury, joseph costello awarded rackham predoc to support research on brain-machine interfaces, walking and slithering aren’t as different as you think, $1.7m to build everyday exoskeletons to assist with lifting, walking and climbing stairs, the nae invites prof. necmiye ozay to symposium to advance the engineering frontier, $1m for open-source first-responder robots, faster path planning for rubble-roving robots, michigan startup memryx, inc. promises faster, cheaper ai processing, $7.5m muri to make dynamic ai smarter and safer, helping robots learn what they can and can’t do in new situations, new grant to expand open source control software for an intuitive robotic prosthetic leg, space motor helps make robotic prosthetic leg more comfortable and extends battery life, small, precise and affordable gyroscope for navigating without gps, a world record for robotic deep freeze walking, u-m researchers provide control software to ensure autonomous vehicles stay in their lane, michigan takes first place at exoskeleton competition, slam-ming good hardware for drone navigation, glen chou receives the ndseg fellowship to improve the safety of autonomous systems, stéphane lafortune named n. harris mcclamroch professor of eecs, necmiye ozay receives henry russel award for extraordinary accomplishment, improving communication between humans and robots in 20 noisy questions, dmitry berenson receives nsf career award to advance a robot’s ability to handle soft objects, necmiye ozay receives onr young investigator award to advance research in autonomous systems, battling drone ships with anthony uytingco, the million foot view, getting people moving – walking exoskeletons could mobilize disabled patients, latest two-legged walking robot arrives at michigan, bigant tackles the wave field, um::autonomy competes with brand new boat design, dmitry berenson helps robots play nice with people, building more stable four-legged robots, how to build a bigant – shai revzen’s critter-inspired robots, cassie: a tougher, lighter bipedal robot with eyes, u-m first in line for new bird-inspired walking robot, $1.1 million grant to develop robot emergency response capabilities, necmiye ozay receives nasa early career faculty award for research in cyber-physical systems, marlo makes initial attempt at the wave field, marlo, the free-standing two-legged robot, conquers terrain with innovative control algorithms, students receive prizes for simulating the best landing of a rocket booster, necmiye ozay receives career award for research in cyber-physical systems, ece welcomes new engineering robotics center, jessy grizzle delivers distinguished university professorship lecture on bipedal robots, 2015 eecs outstanding achievement awards, prof. necmiye ozay awarded darpa young faculty award for research in cyber and physical systems, two-legged robot walks outside at u-m, cockroaches and robots: reverse engineering the balance systems of animals, translating animal movement into better robotic design, robots building better maps: for robots and other mechanical creatures, prof. jessy grizzle honored with hendrik w. bode lecture prize from ieee control systems society, mabel the bipedal robot, distinguished faculty achievement award, jessy grizzle, run, rabbit, run.
- All Research Labs
- 3D Deep Learning
- Applied Research
- Autonomous Vehicles
- Deep Imagination
- New and Featured
- AI Art Gallery
- AI & Machine Learning
- Computer Vision
- Academic Collaborations
- Government Collaborations
- Graduate Fellowship
- Internships
- Research Openings
- Research Scientists
- Meet the Team
Research Areas
Associated publications, researchers.
- Request Information
- Find Faculty & Staff
- Info For Toggle Info Return to Menu Menu
- Search Open Search Close Search
- Message from the Chair
- Department Directory
- Undergraduate Studies
- Graduate Studies
- Co-op & Experiential Learning
- Research Themes
- Research Centers
- Faculty and Staff Directory
- Annual Reports
- Honors & Distinctions
- Faculty Authored Textbooks
- Faculty Hiring
- Student Groups
- Industrial Advisory Board
- Resources for Current Students
- Internal Department Portal
- In the Media
- Spotlight Stories
Robotics & Controls Systems

Robotics & Control Systems is a dynamic field of study that encompasses fundamental research in geometric control, motion planning, and multi-agent robotics, and extends its applications to diverse areas such as minimally invasive surgery, precise control of lightweight yet high-performance manipulator arms, and the coordination of robotic swarms. By pushing the boundaries of intelligent machine design and functionality, robotics research endeavors to drive automation, improve efficiency, and ultimately contribute to the betterment of society.
Researchers in Robotics focuses on intelligent and integrated systems and machines, augmenting traditional mechanical and electrical components with sensors, actuators, and computer control systems. Our research spans a broad spectrum, encompassing practical applications ranging from manufacturing systems and robotic platforms to biological systems. It also encompasses the field of mechatronics, derived from the fusion of mechanics and electronics, which represents a multidisciplinary approach to product design and development. It involves the principles of electrical, mechanical, computer, material, chemical, and industrial engineering.
Within the MIE department at Northeastern, we have a strong, talented group of researchers dedicated to Robotics & Control Systems .
Microsoft Research Blog
Rascal: novel robotics for scalable and highly available automated storage and retrieval.
Published May 14, 2024
By Richard Black , Project Silica Research Director Marco Caballero , Researcher Andromachi Chatzieleftheriou , Principal Researcher Ant Rowstron , Distinguished Engineer / Deputy Lab Director David Sweeney , Principal Industrial Designer Hugh Williams , Principal Research Hardware Engineer
Share this page
- Share on Facebook
- Share on Twitter
- Share on LinkedIn
- Share on Reddit
- Subscribe to our RSS feed
This research paper was presented at the 41 st IEEE International Conference on Robotics and Automation (opens in new tab) (ICRA 2024), the premier international forum for robotics research.

Over the past decade, robotics has revolutionized numerous industries that rely on storage systems, such as manufacturing and warehousing. In these contexts, robotics streamlines operations and increase efficiency, and automated storage and retrieval systems (ASRS) are at the heart of this technological shift, exemplifying the transition to smarter, computer-controlled logistics solutions. These systems quickly move items from storage to fulfilment stations, helping to increase speed and accuracy in the overall process. Yet despite these advances, current ASRS—whether rail-based, fixed, or free-roaming—continue to face challenges, often sacrificing scalability and availability for higher throughput capacity. For instance, the use of fixed robots in traditional tape storage libraries, typically used for archival storage, can lead to availability limitations, as the robots cannot pass each other, and a single robot failure can restrict access to a significant portion of the library.
Our paper, published at ICRA 2024, introduces RASCAL: A Scalable, High-redundancy Robot for Automated Storage and Retrieval Systems , which addresses these concerns. RASCAL is an untethered robot that improves the efficiency of vertical storage systems by operating across evenly spaced, parallel shelves and horizontal rails. Designed to maximize scalability and redundancy, it handles the storage and retrieval of small objects. RASCAL was inspired by the challenges of managing archival storage media in datacenters, and it’s the key component of Project Silica ’s storage and retrieval system. However, RASCAL’s modularity enables it to be used in other scenarios as well.
An innovative approach to archival storage
RASCAL’s design is based on four key principles:
- Addressability : This allows any robot to access any item being stored on the shelves.
- Scalability : The system can adjust retrieval capacity and storage space by adding or removing robots and shelving with negligible downtime.
- Availability : A single robot failure minimally impacts access to items and routing, and it does not obstruct the operation of other robots.
- Serviceability : Robots can easily be added or removed from the rails without the need for special training.
RASCAL’s motion system supports horizontal and vertical movement along storage panels assembled from contiguous storage racks. The parallel rail system enables independent and flexible movement. These rails are designed to be passive —functioning without the need for active power or energy sources, relying instead on their physical structure and positioning to guide and support the robot’s movement along the storage panels. The robot can travel along and between these rails using various pathways to reach a given item. Video 1 shows how RASCAL operates multiple robots on a single storage panel.
RASCAL utilizes a special rail geometry, allowing the robot to passively latch onto the rails with opposing wheels mounted on each end, as illustrated in Figure 1. This design ensures that the robot is securely held in place by gravity alone. The passive nature of this latching mechanism simplifies the process of adding or removing robots from the rails, as it does not require any tools or power.

The robot features two rotating assemblies known as wings , each equipped with wheels that allow it to move horizontally. The wings rotate in a choreographed sequence to enable ascent and descent. RASCAL climbs by unlatching one wing from its current rail while remaining attached to the other. It then rotates and secures its free wing to a new rail either two levels up or down. This is shown in Video 2.
Video 3 demonstrates RASCAL’s item-selection system, or picker interface , which is designed to handle various robotic tool attachments for precise pick-and-place operations. This interface can rotate in alternating directions during climbs, ensuring that the robotic tool attachment, or end effector , remains oriented towards the shelving while stationary, preventing the cables from tangling.
Advancing robotics and automation
As digital economies grow, the need for efficient storage and retrieval systems becomes increasingly urgent. Breakthroughs in robotics technology are poised to drive productivity, efficiency, and innovation across numerous industries. Developments like RASCAL, with its flexible design and advanced capabilities, are leading the way for the next generation of robotics and automation.
MICROSOFT RESEARCH PODCAST

AI Frontiers: The future of scale with Ahmed Awadallah and Ashley Llorens
This episode features Senior Principal Research Manager Ahmed H. Awadallah , whose work improving the efficiency of large-scale AI models and efforts to help move advancements in the space from research to practice have put him at the forefront of this new era of AI.
Related publications
Rascal: a scalable, high-redundancy robot for automated storage and retrieval systems, meet the authors.

Richard Black
Project Silica Research Director
Marco Caballero

Andromachi Chatzieleftheriou
Principal Researcher

Ant Rowstron
Distinguished Engineer / Deputy Lab Director

David Sweeney
Principal Industrial Designer
Hugh Williams
Principal Research Hardware Engineer
Continue reading

Research Focus: Week of January 8, 2024

Research Focus: Week of May 22, 2023
Research areas.
Related projects
- Project Silica
Related labs
- Microsoft Research Lab - Cambridge
- Follow on Twitter
- Like on Facebook
- Follow on LinkedIn
- Subscribe on Youtube
- Follow on Instagram
Share this page:
- Frontiers in Surgery
- Visceral Surgery
- Research Topics
Advances in Robotic Surgery: Innovations, Applications, and Future Directions
Total Downloads
Total Views and Downloads
About this Research Topic
Robotic surgery has emerged as a transformative innovation in the medical field, revolutionizing surgical procedures and providing numerous benefits to both surgeons and patients. This Research Topic aims to delve into the latest advancements, applications, and future trajectories of robotic surgery across various surgical specialties. Recent advancements in robotic surgery have significantly altered the landscape of surgical practices. Developments in instrumentation, along with hardware and software improvements, have enhanced surgical visualization, dexterity, and precision. These innovations push the boundaries of what is possible in the operating room, offering new levels of operational capability that were previously unattainable. The application of robotic systems has expanded into several surgical fields, including urology, gynecology, cardiothoracic surgery, general surgery, and orthopedics. In each specialty, robotic surgery presents unique advantages and challenges. It is crucial to explore how these technologies are reshaping patient care within these fields. Benefits such as reduced pain, shorter recovery times, and enhanced surgical safety are significant factors contributing to the growing adoption of robotic systems. Another critical aspect of robotic surgery is the learning curve associated with its use. Transitioning from traditional surgical methods to robotic-assisted techniques requires comprehensive training programs. These programs are essential to ensure that surgeons acquire the necessary skills and knowledge to optimize patient outcomes. Addressing educational challenges and establishing best practices in training will support the development of a new generation of surgeons proficient in robotic technology. Economic considerations also play a vital role in the integration of robotic surgery into healthcare systems. Discussions on cost-effectiveness, reimbursement strategies, and potential long-term savings through improved patient outcomes are necessary to understand the financial impact of robotic surgery. These analyses help in assessing the sustainability and accessibility of robotic technologies in healthcare. Looking ahead, the integration of artificial intelligence, machine learning, and computer vision with robotic surgical systems holds promising potential. These technologies could enhance surgical planning, provide decision support, and offer real-time intraoperative guidance. Exploring these advanced tools can lead to a future where surgeons are equipped with intelligent systems that enhance their capabilities and improve surgical outcomes. The future direction of robotic surgery includes exciting possibilities such as autonomous surgical robots, remote procedures, and telesurgery. However, these advancements also raise significant ethical and legal concerns that must be addressed. Collaborative efforts among researchers, clinicians, and policymakers are crucial to navigate these challenges and to develop robotic surgery in a responsible, patient-centered manner. In summary, this Research Topic will cover a comprehensive range of topics related to robotic surgery, from current advancements and applications to its economic impact and future possibilities. Through ongoing dialogue and sharing insights from various perspectives, there is significant potential to further advance robotic surgery and redefine healthcare on a global scale.
Keywords : Robotic surgery, Minimally Invasive Surgery, Surgical Robotics, Robotic-Assisted Surgery, Surgical Innovation, Artificial Intelligence in Surgery
Important Note : All contributions to this Research Topic must be within the scope of the section and journal to which they are submitted, as defined in their mission statements. Frontiers reserves the right to guide an out-of-scope manuscript to a more suitable section or journal at any stage of peer review.
Topic Editors
Topic coordinators, submission deadlines, participating journals.
Manuscripts can be submitted to this Research Topic via the following journals:
total views
- Demographics
No records found
total views article views downloads topic views
Top countries
Top referring sites, about frontiers research topics.
With their unique mixes of varied contributions from Original Research to Review Articles, Research Topics unify the most influential researchers, the latest key findings and historical advances in a hot research area! Find out more on how to host your own Frontiers Research Topic or contribute to one as an author.
Help | Advanced Search
Computer Science > Robotics
Title: soft contact simulation and manipulation learning of deformable objects with vision-based tactile sensor.
Abstract: Deformable object manipulation is a classical and challenging research area in robotics. Compared with rigid object manipulation, this problem is more complex due to the deformation properties including elastic, plastic, and elastoplastic deformation. In this paper, we describe a new deformable object manipulation method including soft contact simulation, manipulation learning, and sim-to-real transfer. We propose a novel approach utilizing Vision-Based Tactile Sensors (VBTSs) as the end-effector in simulation to produce observations like relative position, squeezed area, and object contour, which are transferable to real robots. For a more realistic contact simulation, a new simulation environment including elastic, plastic, and elastoplastic deformations is created. We utilize RL strategies to train agents in the simulation, and expert demonstrations are applied for challenging tasks. Finally, we build a real experimental platform to complete the sim-to-real transfer and achieve a 90% success rate on difficult tasks such as cylinder and sphere. To test the robustness of our method, we use plasticine of different hardness and sizes to repeat the tasks including cylinder and sphere. The experimental results show superior performances of deformable object manipulation with the proposed method.
Submission history
Access paper:.
- HTML (experimental)
- Other Formats
References & Citations
- Google Scholar
- Semantic Scholar
BibTeX formatted citation
Bibliographic and Citation Tools
Code, data and media associated with this article, recommenders and search tools.
- Institution
arXivLabs: experimental projects with community collaborators
arXivLabs is a framework that allows collaborators to develop and share new arXiv features directly on our website.
Both individuals and organizations that work with arXivLabs have embraced and accepted our values of openness, community, excellence, and user data privacy. arXiv is committed to these values and only works with partners that adhere to them.
Have an idea for a project that will add value for arXiv's community? Learn more about arXivLabs .
Language selection
- Français fr
WxT Search form
Sensitive technology research areas, pdf version.

358 KB , 16 pages
Introduction
The list of Sensitive Technology Research Areas consists of advanced and emerging technologies that are important to Canadian research and development, but may also be of interest to foreign state, state-sponsored, and non-state actors, seeking to misappropriate Canada’s technological advantages to our detriment.
While advancement in each of these areas is crucial for Canadian innovation, it is equally important to ensure that open and collaborative research funded by the Government of Canada does not cause injury to Canada’s national security or defence.
The list covers research areas and includes technologies at various stages of development. Of specific concern is the advancement of a technology during the course of the research . This list is not intended to cover the use of any technology that may already be ubiquitous in the course of a research project. Each high-level technology category is complemented by sub-categories which provide researchers with further specificity regarding where the main concerns lie.
The list will be reviewed on a regular basis and updated as technology areas evolve and mature, and as new information and insights are provided by scientific and technical experts across the Government of Canada, allied countries, and the academic research community.
top of page
1. Advanced Digital Infrastructure Technology
Advanced digital infrastructure technology refers to the devices, systems and technologies which compute, process, store, transmit and secure a growing amount of information and data that support an increasingly digital and data-driven world.
Advanced communications technology
Technologies that enable fast, secure and reliable wireless communication to facilitate growing demand for connectivity and faster processing and transmission of data and information. These technologies could also enable communications in remote environments or adverse conditions where conventional methods are ineffective, or in spectrum-congested areas. Examples include: adaptive/cognitive/intelligent radios; massive multiple input/multiple output; millimeter-wave spectrum, open/virtualized radio access networks, optical/photonic communications and wideband high frequency communications.
Advanced computing technology
Computing systems with high computational power that enable the processing of complex calculations that are data- or compute-intensive. Examples include: context-aware computing, edge computing, high performance computing and neuromorphic computing.
Cryptography
Methods and technologies that enable secure communications by transforming, transmitting or storing data in a secure format that can only be deciphered by the intended recipient. Examples of emerging capabilities in cryptography that may replace or enhance current encryption methods include: biometric encryption, DNA-based encryption, post-quantum cryptography, homomorphic encryption and optical stealth encryption.
Cyber security technology
Technologies that protect the integrity, confidentiality and availability of internet-connected systems, including their hardware, software, as well as data from unauthorized access or malicious activities. Examples include: cyber defence tools, cross domain solutions and moving target defence technology.
Data storage technology
The methods, tools, platforms, and infrastructure for storing data or information securely in a digital format. Examples include: five-dimensional (5D) optical storage, DNA storage, single-molecule magnets.
Distributed ledger technology
Digital ledgers or databases that track assets or records transactions in multiple locations at the same time, with no centralized or single point of control or storage. Examples include: blockchain, cryptocurrencies, digital currencies and non-fungible tokens.
Microelectronics
Microelectronics encompasses the development and manufacturing of very small electronic designs on a substrate. It incorporates semiconductors as well as more conventional components such as surface mount technology with the goal of producing smaller and faster products. As microelectronics reach the limit for integration, photonic components are making their way into this field. Examples of semiconductor components include: memory-centric logic, multi-chip module, systems-on-chip and stacked memory on chip.
Next-generation network technology
Fifth and future generations of communications networks that use high frequency spectrums to enable significantly faster processing and transmission speeds for larger amounts of data. Advancements in networking could allow for integrated communication across air, land, space and sea using terrestrial and non-terrestrial networks, as well as increased data speed and capacity for network traffic. It could also pave the way for new AI- and big data-driven applications and services, and its massive data processing capabilities could enable the Internet of Everything.
2. Advanced Energy Technology
Advanced energy technology refers to technologies and processes that enable improved generation, storage and transmission of energy, as well as operating in remote or adverse environments where power sources may not be readily available, but are required to support permanent or temporary infrastructure and power vehicles, equipment and devices.
Advanced energy storage technology
Technologies that store energy, such as batteries, with new or enhanced properties, including improved energy density, compact size and low weight to enable portability, survivability in harsh conditions and the ability to recharge quickly. Examples include: fuel cells, novel batteries (biodegradable batteries; graphene aluminium-ion batteries; lithium-air batteries; room-temperature all-liquid-metal batteries; solid-state batteries; structural batteries) and supercapacitors (or ultracapacitors).
Advanced nuclear generation technology
New reactors and technologies that are smaller in size than conventional nuclear reactors and are developed to be less capital-intensive, therefore minimizing risks faced during construction. Examples include: nuclear fusion and small modular reactors.
Wireless power transfer technology
Enables the transmission of electricity without using wire over extended distances that vary greatly and could be up to several kilometres. Examples include recharging zones (analogous to Wi-Fi zones) that allow for electric devices, such as vehicles, to be recharged within a large radius, as well as for recharging space-based objects, such as satellites.
3. Advanced Materials and Manufacturing
Advanced materials.
Advanced materials refer to high-value products, components or materials with new or enhanced structural or functional properties. They may rely on advanced manufacturing processes or novel approaches for their production.
Augmented conventional materials
Conventional materials such as high strength steel or aluminum and magnesium alloys – products that are already widely used – which are augmented to have unconventional or extraordinary properties. Examples of these properties could include improved durability or high temperature strength, corrosion resistance, flexibility, weldability, or reduced weight, among others.
Auxetic materials
Materials that have a negative Poisson’s ratio, meaning that when stretched horizontally, they thicken or expand vertically (rather than thinning as most materials do when stretched), and do the opposite when compressed horizontally. These materials possess unique properties, such as energy-absorption, high rigidity, improved energy/impact absorption and resistance to fracture.
High-entropy materials
Special materials, including high-entropy alloys, high-entropy oxides or other high-entropy compounds, comprised of several elements or components. Depending on their composition, high-entropy materials can enhance fracture toughness, strength, conductivity, corrosion resistance, hardness and other desired properties. Due to the breadth of the theoretically available combinations and their respective properties, these materials can be used in several industries, including aerospace. Additionally, high-entropy oxides are being considered for applications in energy production and storage, as well as thermal barrier coatings.
Metamaterials
Structured materials that are not found or easily obtained in nature. Metamaterials often have unique interactions with electromagnetic radiation (i.e. light or microwaves) or sound waves.
Multifunctional/smart materials
Materials that can transform in response to external stimuli (e.g. heat, water, light, etc.) within a given amount of time. Examples include: magnetorheological fluid, shape memory alloys, shape memory polymers and self-assembled materials.
Nanomaterials
Nanomaterial materials have dimensions of less than 100 nanometers and exhibit certain properties or unique characteristics such as increased durability or self-repair. A subset of nanomaterials, nano-energetic materials are energetic materials synthesized and fabricated at the nano-level that have a small particle size and high surface area between particles, which enable faster or more efficient reaction pathways when exposed to other substances.
Powder materials for additive manufacturing
Powders that typically consist of metal, polymer, ceramic and composite materials. These powders enable additive manufacturing processes, also referred to as 3D printing. Research into novel powder materials can lead to manufactured parts with enhanced mechanical properties and other desired characteristics.
Superconducting materials
Materials that can transmit electricity with no resistance, ultimately eliminating power losses associated with electrical resistivity that normally occurs in conductors. Manufacturing of superconducting electronic circuits is one of the most promising approaches to implementing quantum computers.
Two-dimensional (2D) materials
Materials with a thickness of roughly one atomic layer. One of the most well-known 2D materials, for which there are currently production/fabrication technologies, is graphene. Other examples of 2D materials include: silicene, germanene, stantene, metal chalcogenides and others, which are currently being researched with potential applications in sensors, miniaturized electronic devices, semiconductors and more.
Advanced Manufacturing
Advanced manufacturing refers to enhanced or novel technologies, tools and processes used to develop and manufacture advanced materials or components. This could include using specialized software, artificial intelligence, sensors and high performance tools, among others, to facilitate process automation or closed-loop automated machining and create new materials or components.
Additive manufacturing (3D printing)
Various processes in which solid three-dimensional objects are constructed using computer-aided-design (CAD) software to build an object, ranging from simple geometric shapes to parts for commercial airplanes. 3D printing could be used to accelerate the development through rapid prototyping of customized equipment, spare tools or novel shapes or objects that are stronger and lighter. Approaches are also being developed for multi-material additive manufacturing and volumetric additive manufacturing, as well as additive manufacturing for repair and restoration.
Advanced semiconductor manufacturing
Methods, materials and processes related to the manufacturing of semiconductor devices. Examples of techniques include: advancements in deposition, coating, lithography, ionization/doping, and other core and supporting processes, such as thermal management techniques. Recent technological advancements include developments in Extreme Ultraviolet (EUV) lithography, which is an advanced method for fabricating intricate patterns on a substrate to produce a semiconductor device with extremely small features.
Critical materials manufacturing
Up and midstream technologies necessary to extract, process, upgrade, and recycle/recover critical materials (e.g. rare earth elements, scandium, lithium, etc.) and establish and maintain secure domestic and allied supply chains. More information about critical minerals can be found in Canada’s Critical Minerals List .
Four-dimensional (4D) printing
Production and manufacture of 3D products using multifunctional or “smart” materials that are programmed to transform in response to external stimuli (e.g. heat, water, light, etc.) within a given amount of time. Recent developments have also been made in creating reversible 4D printed objects, which can return to their original shape without human involvement.
Nano-manufacturing
Production and manufacture of nanoscale materials, structures, devices and systems in a scaled-up, reliable and cost-effective manner.
Two-dimensional (2D) materials manufacturing
Standardized, scalable and cost-effective large-scale production of 2D materials.
4. Advanced Sensing and Surveillance
Advanced sensing and surveillance refers to a large array of advanced technologies that detect, measure or monitor physical, chemical, biological or environmental conditions and generate data or information about them. Advanced surveillance technologies, in particular, are used to monitor and observe the activities and communications of specific individuals or groups for national security or law enforcement purposes, but have also been used for mass surveillance with increased accuracy and scale.
Advanced biometric recognition technologies
Technologies that identify individuals based on their distinctive physical identifiers (e.g. face, fingerprint or DNA) or behavioural identifiers (e.g. gait, keystroke pattern and voice). These technologies are becoming more advanced due to improving sensing capabilities, as well as integrating artificial intelligence to identify/verify an individual more quickly and accurately.
Advanced radar technologies
Radar is a system that uses radio waves to detect moving objects and measure their distance, speed and direction. Advancements in radar technology could enable improved detection and surveillance in different environments and over greater distances. Examples include: active electronically-scanned arrays, cognitive radars, high frequency skywave radar (or over-the-horizon radar), passive radar and synthetic aperture radar.
Atomic interferometer sensors
Sensors that perform sensitive interferometric measurements using the wave character of atomic particles and quantum gases. These sensors can detect small changes in inertial forces and can be used in gravimetry. They can also improve accuracy in navigation and provide position information in environments where the Global Positioning System (GPS) is unavailable.
Cross-cueing sensors
Systems that enable multiple sensors to cue one another. Cross cueing can be used in satellites for data validation, objection tracking, enhanced reliability (i.e. in the event of a sensor failure) and earth observations.
Electric field sensors
Sensors that detect variations in electric fields and use low amounts of power. They are useful for detecting power lines or lightning, as well as locating power grids or damaged components in the aftermath of a natural disaster.
Imaging and optical devices and sensors
Devices and sensors that provide a visual depiction of the physical structure of an object beyond the typical capabilities of consumer grade imaging techniques such as cameras, cellphones, and visible light-imaging. Such technologies typically make use of electromagnetic radiation beyond the visible spectrum, or use advanced techniques and materials to improve optical capabilities, such as enabling more precise imaging from a greater distance. This sensitive research area also includes sensitive infrared sensors.
Magnetic field sensors (or magnetometers)
Sensors that are used to detect or measure changes in a magnetic field, or its intensity or direction.
Micro (or nano) electro-mechanical systems (M/NEMS)
Miniaturized, lightweight electro-mechanical devices that integrate mechanical and electrical functionality at the microscopic or nano level. A potential use of M/NEMS could be as ‘smart dust’, or a group of M/NEMs, made up of various components, including sensors, circuits, communications technology and a power supply, that function as a single digital entity. Smart dust could be light enough to float in the air and detect vibrations, light, pressure and temperature, among other things, to capture a great deal of information about a particular environment.
Position, navigation and timing (PNT) technology
Systems, platforms or capabilities that enable accurate and timely calculation of positioning, navigation and timing. These technologies are critical to a wide-range of applications, most notably for enabling the Global Navigation Satellite System (GNSS), one of which is the widely-used Global Positioning System (GPS), but also for enabling navigation in areas where GPS or GNSS do not work. Examples include: chip-scale advanced atomic clocks, gravity-aided inertial navigation system, long-range underwater navigation system, magnetic anomaly navigation, precision inertial navigation system.
Side scan sonar
An active sonar system that uses a transducer array to send and receive acoustic pulses in swaths laterally from the tow-body or vessel, enabling it to quickly scan a large area in a body of water to produce an image of the sea floor beneath the tow-body or vessel.
Synthetic aperture sonar (SAS)
An active sonar system that produces high resolution images of the sea floor along the track of the vessel or tow body. SAS can send continuous sonar signals to capture images underwater at 30 times the resolution of traditional sonar systems, as well as up to 10 times the range and area coverage.
Underwater (wireless) sensor network
Network of sensors and autonomous/uncrewed underwater vehicles that use acoustic waves to communicate with each other, or with underwater sinks that collect and transmit data from deep ocean sensors, to enable remote sensing, surveillance and ocean exploration, observation and monitoring.
5. Advanced Weapons
Emerging or improved weapons used by military, and in some instances law enforcement, for defence and national security purposes. Advancements in materials, manufacturing, propulsion, energy and other technologies have brought weapons like directed energy weapons and hypersonic weapons closer to reality, while nanotechnology, synthetic biology, artificial intelligence and sensing technologies, among others, have provided enhancements to existing weapons, such as biological/chemical weapons and autonomous weapons.
6. Aerospace, Space and Satellite Technology
Aerospace technology refers to the technology that enables the design, production, testing, operation and maintenance of aircraft, spacecraft and their respective components, as well as other aeronautics. Space and satellite technology refers to technologies that enable travel, research and exploration in space, as well as weather-tracking, advanced PNT, communications, remote sensing and other capabilities using satellites and other space-based assets.
Advanced wind tunnels
Technological advancements in systems related to wind tunnel infrastructure. Existing facilities are used to simulate various flight conditions and speeds ranging from subsonic, transonic, supersonic and hypersonic.
On-orbit servicing, assembly and manufacturing systems
Systems and equipment that are used for space-based servicing, assembly and manufacturing. On-orbit servicing, assembly and manufacturing systems can be used to optimize space logistics, increase efficiencies, mitigate debris threats and to modernize space asset capabilities.
Lower cost satellite payloads with increased performance that can meet the needs of various markets. This will require several technology improvements, such as light weight apertures, antennas, panels, transceivers, control actuators, optical/infrared sensor and multi-spectral imagers, to meet the growing demand and ever-increasing technical requirements.
Propulsion technologies
Components and systems that produce a powerful thrust to push an object forward, which is essential to launching aircraft, spacecraft, rockets or missiles. Innovations could range from new designs or advanced materials to enable improved performance, speed, energy-efficiency and other enhanced properties, as well as reduced aircraft production times and emissions. Examples include: electrified aircraft propulsion, solar electric propulsion, pulse detonation engines, nuclear thermal propulsion systems, nuclear pulse propulsion systems and nuclear electric propulsion systems, among others.
Artificial or human-made, including (semi-)autonomous, objects placed into orbit. Depending on their specific function, satellites typically consist of an antenna, radio communications system, a power source and a computer, but their exact composition may vary. Continued developments have led to smaller satellites that are less costly to manufacture and deploy compared to large satellites, resulting in faster development times and increased accessibility to space. Examples include: remote sensing and communications satellites.
Space-based positioning, navigation and timing technology
Global Navigation Satellite System (GNSS)-based satellites and technologies that will improve the accuracy, agility and resilience of GNSS and the Global Positioning System (GPS).
Space stations
Space-based facility that can act as an orbital outpost while having the ability to support extended human operations. Space stations can be used as a hub to support other space-based activities including assembly, manufacturing, research, experimentations, training, space vehicle docking and storage. Examples of innovations in space stations could include the ability to extend further out into space or enhanced life support systems that can be used to prolong human missions.
Zero-emission/fuel aircraft
Aircraft powered by energy sources that do not emit polluting emissions that disrupt the environment or do not require fuel to fly. While still in early stages, these advances in powering aircraft could support cleaner air travel, as well as enable flight over greater distances and to remote areas without the need for refueling (for zero-fuel aircraft).
7. Artificial Intelligence and Big Data Technology
Artificial intelligence (AI) is a broad field encompassing the science of making computers behave in a manner that simulates human behaviour/intelligence using data and algorithms. Big data refers to information and data that is large and complex in volume, velocity and variety, and as such, requires specialized tools, techniques and technologies to process, analyze and visualize it. AI and big data technology may be considered cross-cutting given how important they are in enabling developments in other technology areas, including biotechnology, advanced materials and manufacturing, robotics and autonomous systems and others.
AI chipsets
Custom-designed chips meant to process large amounts of data and information that enable algorithms to perform calculations more efficiently, simultaneously and using less energy than general-purpose chips. AI chips have unique design features specialized for AI, which may make them more cost-effective to use for AI development.
Computer vision
Field of AI that allows computers to see and extract meaning from the content of digital images such as photos and videos. Examples of computer vision techniques include: image classification, object detection, depth perception and others.
Data science and big data technology
Enables the autonomous or semi-autonomous analysis of data, namely large and/or complex sets of data when it comes to big data technology. It also includes the extraction or generation of deeper insights, predictions or recommendations to inform decision-making. Examples include: AI-enabled data analytics, big data technology (i.e. data warehouse, data mining, data correlation) and predictive analytics.
Digital twin technology
Virtual representations of physical objects or systems that combine real-time sensor data, big data processing and artificial intelligence (namely machine learning) to create an interactive model and predict the object or system’s future behaviour or performance. Advancements in digital twin technology could enable the growth and integration of an immersive digital experience (e.g. the metaverse) into daily life.
Machine learning (ML)
Branch of AI where computer programs are trained using algorithms and data to improve their decisions when introduced to a new set of data without necessarily being programmed to do so. Types of ML include: deep learning, evolutionary computation and neural networks.
Natural language processing
An area of AI that allows computers to process and make sense of, or ‘translate’, natural human language using speech and audio recognition to identify, analyze and interpret human voices and other types of audio. Examples include: syntactic and semantic analysis, tokenization, text classification and others, which enable capabilities like virtual assistants, chatbots, machine translation, predictive text, sentiment analysis and automatic summarization.
8. Human-Machine Integration
Human-machine integration refers to the pairing of operators with technology to enhance or optimize human capability. The nature of the integration can vary widely, with an important dimension being the invasive nature of the pairing.
Brain-computer interfaces
Interfaces that allow a human to interact with a computer directly via input from the brain through a device that senses brain activity, allowing for research, mapping, assistance or augmentation of human brain functions that could enable improved cognitive performance or communication with digital devices.
Exoskeletons
External devices or ‘wearable robots’ that can assist or augment the physical and physiological performance/capabilities of an individual or a group.
Neuroprosthetic/cybernetic devices
Implanted and worn devices that interact with the nervous system to enhance or restore motor, sensory, cognitive, visual, auditory or communicative functions, often resulting from brain injury. This includes cybernetic limbs or devices that go beyond medical use to contribute to human performance enhancement.
Virtual/augmented/mixed reality
Immersive technologies that combine elements of the virtual world with the real world to create an interactive virtual experience. An application of these technologies that several companies are developing is the ‘metaverse’ which is an immersive digital experience that integrates the physical world with the digital one and allows users to interact and perform a variety of activities like shopping and gaming, seamlessly in one virtual ecosystem. While still being explored, this could potentially translate into a digital economy with its own currency, property and other goods.
Wearable neurotechnology
Brain-computer interfaces that are wearable and non-invasive (i.e. do not need to be implanted). These wearable brain devices can be used for medical uses, such as tracking brain health and sending data to a doctor to inform treatment, as well as for non-medical applications related to human optimization, augmentation or enhancement, such as user-drowsiness, cognitive load monitoring or early reaction detection, among others.
9. Life Science Technology
Life science technology is a broad term that encompasses a wide array of technologies that enhance living organisms, such as biotechnology and medical and healthcare technologies.
Biotechnology
Biotechnology uses living systems, processes and organisms, or parts of them, to develop new or improved products, processes or services. It often integrates other areas of technology, such as nanotechnology, artificial intelligence, computing and others, to create novel solutions to problems, including in the area of human performance enhancement.
Biomanufacturing
Methods and processes that enable the industrial production of biological products and materials through the modification of biological organisms or systems. Advances in biomanufacturing, such as automation and sensor-based production, has led to commercial-scale production of new biological products, such as biomaterials and biosensors.
Genomic sequencing and genetic engineering
Technologies that enable whole genome sequencing, the direct manipulation of an organism’s genome using DNA, or genetic engineering to produce new or modified organisms. Examples include: Clustered Regularly Interspaced Short Palindromic Repeats (CRISPR) and Next Generation Sequencing (NGS).
Large-scale and experimental analysis of protein, proteomes and proteome informatics. Proteomic applications can be used for the identification of unknown bacterial species and strains, as well as species level identifications of tissues, body fluids, and bones of unknown origin.
Synthetic biology
Combination of biology and engineering to create new biological entities, such as cells or enzymes, or redesign existing biological systems, with new functions like sensing or producing a specific substance. Synthetic biology is expected to enable advancements in many areas, such as antibiotic, drug and vaccine development, biocomputers, biofuel, novel drug delivery platforms, novel chemicals, synthetic food, and synthetic life.
Medical and Healthcare Technology
Medical and healthcare technology refers to tools, processes or services that support good health and prevent, or attempt to prevent, disease. Advances in biotechnology, nanotechnology and advanced materials are enabling new methods of delivering medicine or treating injuries, diseases or exposure to toxic substances.
Chemical, Biological, Radiological and Nuclear (CBRN) medical countermeasures
Various medical assets used to prevent, identify or treat injuries or illnesses caused by chemical, biological, radiological or nuclear (CBRN) threats, whether naturally-occurring or engineered. CBRN medical countermeasures include therapeutics to treat injuries and illnesses, such as biologic products or drugs, as well diagnostics to identify the threats.
Gene therapy
Use of gene manipulation or modification in humans to prevent, treat or cure disease, either by replacing or disabling disease-causing genes or inserting new or modified genes.
Nanomedicine
Use of nanomaterials to diagnose, monitor, prevent and/or treat disease. Examples of nanomedicine include nanoparticles for targeted drug delivery, smart imaging using nanomaterials, as well as nano-engineered implants to support tissue engineering and regenerative medicine.
Tissue engineering and regenerative medicine
Methods of regenerating or rebuilding cells, tissues or organs to allow normal, biological functions to be restored. Regenerative medicine includes self-healing, where the body is able to use its own tools or other biological materials to regrow tissues or cells, whereas tissue engineering largely focuses on the use of synthetic and biological materials, such as stem cells, to build function constructs or supports that help heal or restore damaged tissues or organs.
10. Quantum Science and Technology
Quantum science and technology refers to a new generation of devices that use quantum effects to significantly enhance the performance over those of existing, ‘classical’, technologies. This technology is expected to deliver sensing and imaging, communications, and computing capabilities that far exceed those of conventional technologies in certain cases, well as new materials with extraordinary properties and many useful applications. Quantum science and technology may be considered cross-cutting, given that quantum-enhanced technologies are expected to enable advancements or improvements in most other technology areas, including biotechnology, advanced materials, robotics and autonomous systems, aerospace, space and satellite technology and others.
Quantum communications
Use of quantum physics to enable secure communications and protect data using quantum cryptography, also know as quantum key distribution.
Quantum computing
Use of quantum bits, also known as qubits, to process information by capitalizing on quantum mechanical effects that allow for a large amount of information, such as calculations, to be processed at the same time. A quantum computer that can harness qubits in a controlled quantum state may be able to compute and solve certain problems significantly faster than the most powerful supercomputers.
Quantum materials
Materials with unusual magnetic and electrical properties. Examples include: superconductors, graphene, topological insulators, Weyl semimetals, metal chalcogenides and others. While many of these materials are still being explored and studied, they are promising contenders that could enable energy-efficient electrical systems, better batteries and the development of new types of electronic devices.
Quantum sensing
Broad of range of devices, at various stages of technological readiness, that use quantum systems, properties, or phenomena to measure a physical quantity with increased precision, stability and accuracy. Recent developments in applications of quantum physics identified the possibility of exploiting quantum phenomena as means to develop quantum radar technology.
Quantum software
Software and algorithms that run on quantum computers, enable the efficient operation and design of quantum computers, or software that enables the development and optimization of quantum computing applications.
11. Robotics and Autonomous Systems
Robotics and Autonomous Systems are machines or systems with a certain degree of autonomy (ranging from semi- to fully autonomous) that are able to carry out certain activities with little to no human control or intervention by gathering insights from their surroundings and making decisions based on them, including improving their overall task performance.
Molecular (or nano) robotics
Development of robots at the molecular or nano-scale level by programming molecules to carry out a particular task.
(Semi-)autonomous/uncrewed aerial/ground/marine vehicles
Vehicles that function without any onboard human intervention, and instead, are either controlled remotely by a human operator, or operate semi-autonomously or autonomously. Uncrewed vehicles rely on software, sensors and artificial intelligence technology to collect and analyze information about their environment, plan and alter their route (if semi- or fully autonomous), and interact with other vehicles (or human operator, if remotely-controlled).
Service robots
Robots that carry out tasks useful to humans that may be tedious, time-consuming, repetitive, dangerous or complement human behaviour when resources are not available, e.g. supporting elderly people. They are semi- or fully-autonomous, able to make decisions with some or no human interaction/intervention (depending on the degree of autonomy), and can be manually overridden by a human.
Space robotics
Devices, or ‘space robots’, that are able to perform various functions in orbit, such as assembling or servicing, to support astronauts, or replace human explorers in the exploration of remote planets.
Microsoft taps Sanctuary AI for general-purpose robot research

Microsoft, it seems, is hedging its bets when it comes to general-purpose robotics AI. At the end of February, the Windows maker spearheaded a massive $675 million Series B in Bay Area-based Figure. Today, the tech giant announced a collaboration with Figure competitor Sanctuary AI, best known for its humanoid robot, Phoenix.
The Sanctuary partnership really gets to the heart of Microsoft’s interest in the category: artificial general intelligence. It’s a concept that comes up a lot when discussing humanoid robots — too often, I would argue, given the state of things. While such breakthroughs are likely several years off (at least), they’re required for humanoid robots to reach the long promised “general-purpose status.”
In essence, that means robots that can learn and reason like humans. That represents a potential quantum leap for robotic capabilities, which have traditionally been limited to one or two tasks. The humanoid form factor opens these systems to a far broader range of motion than single-purpose systems, but they will ultimately need the intelligence to match.
“Creating systems that think like, and understand us, is one of the biggest civilization-level technical problems and opportunities that we will ever face,” Sanctuary co-founder and CEO Geordie Rose notes. “A challenge like this requires the best global minds to work together. We’re excited to be working with Microsoft to unlock the next generation of AI models that will power general-purpose robots.”
Such a partnership deepens Microsoft’s commitment to AI development and delivers a partner who can design hardware to those specifications. Sanctuary has been operating in the space for some time now, and recently scored a pilot partnership with Magna , which will bring the latest version of Phoenix to car plants.
All told, Sanctuary robots “have been tested across 400 customer-defined tasks across 15 different industries.” Of course, we’re still in the very early stages of all of this.
Microsoft founder Bill Gates spoke about his own interest in humanoids earlier this year. Neither Sanctuary nor Figure got a mention, though he did spend some time discussing competitors Agility and Apptronik.
Microsoft isn’t alone in hedging its bets in the category. OpenAI (another Microsoft partner) has made its own investments in both Figure and competitor 1X.
More TechCrunch
Get the industry’s biggest tech news, techcrunch daily news.
Every weekday and Sunday, you can get the best of TechCrunch’s coverage.
Startups Weekly
Startups are the core of TechCrunch, so get our best coverage delivered weekly.
TechCrunch Fintech
The latest Fintech news and analysis, delivered every Sunday.
TechCrunch Mobility
TechCrunch Mobility is your destination for transportation news and insight.
LearnLM is Google’s new family of AI models for education
Google says it’s developed a new family of generative AI models “fine-tuned” for learning: LearnLM. A collaboration between Google’s DeepMind AI research division and Google Research, LearnLM models — built…

Google is bringing AI-generated quizzes to academic videos on YouTube
The official launch comes almost a year after YouTube began experimenting with AI-generated quizzes on its mobile app.

Motional cut about 550 employees, around 40%, in recent restructuring, sources say
Around 550 employees across autonomous vehicle company Motional have been laid off, according to information taken from WARN notice filings and sources at the company. Earlier this week, TechCrunch reported…

Google I/O 2024: Watch all of the AI, Android reveals
The keynote kicks off at 10 a.m. PT on Tuesday and will offer glimpses into the latest versions of Android, Wear OS and Android TV.

Google mentioned ‘AI’ 120+ times during its I/O keynote
It ran 110 minutes, but Google managed to reference AI a whopping 121 times during Google I/O 2024 (by its own count). CEO Sundar Pichai referenced the figure to wrap…

Google I/O 2024: Here’s everything Google just announced
Here are quick hits of the biggest news from the keynote as they are announced.

Google Play preps a new full-screen app discovery feature and adds more developer tools
Google Play has a new discovery feature for apps, new ways to acquire users, updates to Play Points, and other enhancements to developer-facing tools.

Gemini on Android becomes more capable and works with Gmail, Messages, YouTube and more
Soon, Android users will be able to drag and drop AI-generated images directly into their Gmail, Google Messages and other apps.

Google Veo, a serious swing at AI-generated video, debuts at Google I/O 2024
Veo can capture different visual and cinematic styles, including shots of landscapes and timelapses, and make edits and adjustments to already-generated footage.

Gemini comes to Gmail to summarize, draft emails, and more
In addition to the body of the emails themselves, the feature will also be able to analyze attachments, like PDFs.

Google is bringing Gemini capabilities to Google Maps Platform
The summaries are created based on Gemini’s analysis of insights from Google Maps’ community of more than 300 million contributors.

Project IDX, Google’s next-gen IDE, is now in open beta
Google says that over 100,000 developers already tried the service.

Google will use Gemini to detect scams during calls
The system effectively listens for “conversation patterns commonly associated with scams” in-real time.

Google announces Gemma 2, a 27B-parameter version of its open model, launching in June
The standard Gemma models were only available in 2 billion and 7 billion parameter versions, making this quite a step up.

Google TalkBack will use Gemini to describe images for blind people
This is a great example of a company using generative AI to open its software to more users.
Google launches Firebase Genkit, a new open source framework for building AI-powered apps
Firebase Genkit is an open source framework that enables developers to quickly build AI into new and existing applications.

Google is building its Gemini Nano AI model into Chrome on the desktop
This will enable developers to use the on-device model to power their own AI features.

Circle to Search is now a better homework helper
Google’s Circle to Search feature will now be able to solve more complex problems across psychics and math word problems.

Google experiments with using video to search, thanks to Gemini AI
People can now search using a video they upload combined with a text query to get an AI overview of the answers they need.

Google will soon start using GenAI to organize some search results pages
A search results page based on generative AI as its ranking mechanism will have wide-reaching consequences for online publishers.

Google is adding more AI to its search results
Google has built a custom Gemini model for search to combine real-time information, Google’s ranking, long context and multimodal features.

Google’s next-gen TPUs promise a 4.7x performance boost
At its Google I/O developer conference, Google on Tuesday announced the next generation of its Tensor Processing Units (TPU) AI chips.

Google’s Gemini updates: How Project Astra is powering some of I/O’s big reveals
Google is upgrading Gemini, its AI-powered chatbot, with features aimed at making the experience more ambient and contextually useful.

Google’s image-generating AI gets an upgrade
Veo can generate few-seconds-long 1080p video clips given a text prompt.

Google’s generative AI can now analyze hours of video
At Google I/O, Google announced upgrades to Gemini 1.5 Pro, including a bigger context window. .

Google Photos introduces an AI search feature, Ask Photos
The AI upgrade will make finding the right content more intuitive and less of a manual search process.

Apple touts stopping $1.8B in App Store fraud last year in latest pitch to developers
Apple released new data about anti-fraud measures related to its operation of the iOS App Store on Tuesday morning, trumpeting a claim that it stopped over $7 billion in “potentially…

Expedia starts testing AI-powered features for search and travel planning
Online travel agency Expedia is testing an AI assistant that bolsters features like search, itinerary building, trip planning, and real-time travel updates.

Inside TabaPay’s drama-filled decision to abandon its plans to buy Synapse’s assets
Welcome to TechCrunch Fintech! This week, we look at the drama around TabaPay deciding to not buy Synapse’s assets, as well as stocks dropping for a couple of fintechs, Monzo raising…

Threat actor scraped Dell support tickets, including customer phone numbers
The person who claimed to have stolen the physical addresses of 49 million Dell customers appears to have taken more data from a different Dell portal, TechCrunch has learned. The…
Jump to navigation
- UTCS Direct
KVUE Highlights UT's AI Master's Program, Witnessing Soaring Demand
Submitted by Anonymous on Wed, 05/08/2024 - 12:00am

The University of Texas has introduced a new Master of Science in Artificial Intelligence program, which has received a tremendous response from students. Over 600 students have enrolled in the program's first semester, indicating the growing interest in AI-related jobs worldwide. The university has emphasized the program's focus on developing AI experts for future generations. The curriculum strongly emphasizes ethics to equip graduates with the necessary skills to navigate the ethical aspects of AI technology. Students are enthusiastic about leveraging their advanced AI education to create positive change in high-impact areas such as climate change. As demand for AI expertise rises across various sectors, UT expects substantial growth in program enrollment.
- Undergraduate Office
- Graduate Office
- Office of External Affairs
- Mission Statement
- Emergency Information
- Site Policies
- Web Accessibility Policy
- Web Privacy Policy
COMMENTS
Artificial Intelligence and Decision-making combines intellectual traditions from across computer science and electrical engineering to develop techniques for the analysis and synthesis of systems that interact with an external world via perception, communication, and action; while also learning, making decisions and adapting to a changing environment.
Research in the foundational concepts of robotics and automation covers an interdisciplinary range of topics. Computational methodologies, electronics engineering, and physics are all foundational areas of robotics research. Sub-topics include simulation, kinematics, control, optimization, and probabilistic inference. Learn More.
Robotics. Having a machine learning agent interact with its environment requires true unsupervised learning, skill acquisition, active learning, exploration and reinforcement, all ingredients of human learning that are still not well understood or exploited through the supervised approaches that dominate deep learning today.
Mechatronics and Robotics. Mechatronics researchers in UW Mechanical Engineering are engaged in an array of groundbreaking projects at the intersections of mechanics, electronics and computing. Much of this work takes place in the area of robotics; our faculty are at the forefront of research in robot-human interaction, nanorobotics, automation ...
Focus Areas. Artificial Intelligence. Autonomous & Connected Vehicles. Deep Learning for Robotics. Human-Robot Interaction. Legged Robots & Exoskeletons. Manufacturing Robotics. Motion Planning. Rehabilitation Robotics.
Robotics research at SEAS spans topics that are both basic and applied. Some areas of focus include: soft wearable robots for physical rehabilitation, assistive movement, ergonomic support, and enhanced training. medical robots for automated and minimally invasive surgical procedures
The Stanford Robotics Center focuses on bridging innovative research and large-scale transformative real-world applications in areas of Field Robotics, Industry/Service, Health/Wellness, and Education/Culture. The cross-disciplinary research in these areas will contribute a shared core of robotic science and technology providing a foundation to ...
A self-organizing robotic aggregate using solid and liquid-like collective states. by. Baudouin Saintyves. Matthew Spenko. Heinrich M. Jaeger. Science Robotics Vol. 9, NO. 86 24 Jan 2024. Research Article.
Advances in Dynamics, Control, Perception, Path Planning and Traffic Management of Unmanned Aerial Robotic Systems. Sreenatha Anavatti. Ranjith Ravindranathan Nair. Mir Feroskhan. 600 views. 1 article. A multidisciplinary journal focusing on the theory of robotics, technology, and artificial intelligence, and their applications - from ...
The goal of robotics research is to create more complex tools that can mimic the actions and intelligence of humans and animals. As robots become more sophisticated, their design, operation, and applications become more complex. Research in robotics at Princeton spans a wide variety of research areas including perception, control, learning, and ...
IEEE Robotics and Automation Letters 2024, IROS 2024. 2024. In this paper we propose an approach to trajectory planning based on the purpose of the task. For a redundant manipulator, many end effector poses in the task space can be achieved with multiple joint configurations. In planning the motion, we are ….
Major areas of research in robotics focus on manufacturing (automation of supply chains) and developing robotic technologies for implementation in a variety of industrial applications (like a robotic dynamic brake hose routing system). Our 3D printer research continues to make headlines worldwide and had solidified Michigan Tech as one of the ...
Robotics Area of Research Excellence Robotics Area of Research Excellence. The focus of our robotics area is the design, modeling and control of systems that observe, move within, interact with, and act upon their environment. Such systems include mobile robots, micro-aerial vehicles and large active sensor networks.
In Robotics, we research, design, and build a wide variety of robot systems, studying how robots interact with their environments, objects around them, other robots, or humans who they are helping.Robotics utilizes a broad range of disciplines within computer science and beyond, from mathematics to mechanics to biology. Especially important tools from computer science include artificial ...
Our research in robotics and autonomy drives fundamental advances in materials, actuation, and sensing and control; sensorimotor integration; locomotion, manipulation, and swarm behavior; machine perception and cognition; and human-robot interaction. View robotics and autonomy faculty. Research Area Subtopics A model of a fish's electrosensory ...
Robotics Research at RI: autonomous vehicles, space-robotics, graphics, medical robotics, computer vision, artificial intelligence, AI, CV.
The Minnesota Robotics Institute encompasses several disciplines in departments across the University of Minnesota. The best way to learn about robotics and sensing is being able to work with multiple disciplines and in many mediums. Our core research areas include: Agriculture and Environmental Monitoring
Professor Wiens is currently conducting research in the area of human-robot collaboration for smart factory, integrating AI with robot control in providing augmented intelligence of robots interacting with humans, other robots and machines. She has also been conducting research in the areas of intelligent and autonomous robotic systems ...
Robots are evolving from stationary devices that perform manufacturing tasks to mobile, information gathering, computing, and decision making platforms. The autonomous vehicles participating in the DARPA Grand Challenges highlighted the significant progress that has been made in this area and the enormous work that remains to be done. At the ...
Research Areas. Robotics. Associated Publications. 2023 ... International Journal of Robotics Research (IJRR) 2021. Goal-Auxiliary Actor-Critic for 6D Robotic Grasping with Point Clouds. Lirui Wang, Yu Xiang, Wei Yang, Arsalan Mousavian, Dieter Fox. Conference on Robot Learning 2021.
Robotics & Control Systems is a dynamic field of study that encompasses fundamental research in geometric control, motion planning, and multi-agent robotics, and extends its applications to diverse areas such as minimally invasive surgery, precise control of lightweight yet high-performance manipulator arms, and the coordination of robotic swarms. By pushing the boundaries of intelligent ...
Robotic devices and systems. Autonomous air, sea, undersea, and land vehicles. Space exploration and development. Intelligent control systems. Biomimetic modeling, dynamics, and control. Cooperating robots for manufacturing and assembly. Cooperative control of natural and engineered groups. Identification of dynamic system models.
This research paper was presented at the 41 st IEEE International Conference on Robotics and Automation (opens in new tab) (ICRA 2024), the premier international forum for robotics research. Over the past decade, robotics has revolutionized numerous industries that rely on storage systems, such as manufacturing and warehousing.
Robotic surgery has emerged as a transformative innovation in the medical field, revolutionizing surgical procedures and providing numerous benefits to both surgeons and patients. This Research Topic aims to delve into the latest advancements, applications, and future trajectories of robotic surgery across various surgical specialties.Recent advancements in robotic surgery have significantly ...
Deformable object manipulation is a classical and challenging research area in robotics. Compared with rigid object manipulation, this problem is more complex due to the deformation properties including elastic, plastic, and elastoplastic deformation. In this paper, we describe a new deformable object manipulation method including soft contact simulation, manipulation learning, and sim-to-real ...
Imagine having the power to design and build intelligent machines that can explore other planets, perform life-saving surgeries, or revolutionize manufacturing - those are just a few of the many exciting innovations a career in robotics engineering could hold for you. And with the global robotics market projected to surpass $151 billion by 2031 in the United States alone, the industry is one ...
The list covers research areas and includes technologies at various stages of development. Of specific concern is the advancement of a technology during the course of the research. This list is not intended to cover the use of any technology that may already be ubiquitous in the course of a research project. ... Robotics and Autonomous Systems ...
Microsoft, it seems, is hedging its bets when it comes to general-purpose robotics AI. At the end of February, the Windows maker spearheaded a massive $675 million Series B in Bay Area-based ...
The University of Texas has introduced a new Master of Science in Artificial Intelligence program, which has received a tremendous response from students. Over 600 students have enrolled in the program's first semester, indicating the growing interest in AI-related jobs worldwide. The university has emphasized the program's focus on developing AI experts for future