
Mechatronics engineering projects ideas for final year students
Mechatronics engineering is a rapidly advancing field that combines the principles of electrical and mechanical engineering to create practical and innovative solutions for various industries. With its interdisciplinary nature, mechatronics has become indispensable in the development of cutting-edge products and technologies.
One fascinating area within mechatronics engineering is robotics. As robotics continues to revolutionize industries such as manufacturing, healthcare, and transportation, mechatronics engineers play a crucial role in designing and programming robots that can perform complex tasks autonomously.
For aspiring mechatronics engineering students, brainstorming project ideas to work on can be an exciting yet challenging task. To provide some inspiration, here is a curated list of intriguing project ideas:
- Autonomous Drone Delivery System: Design and develop a drone delivery system capable of autonomously navigating through obstacles and delivering packages to specified destinations.
- Smart Home Automation: Create a home automation system that integrates various sensors and actuators to intelligently control devices, such as lighting, temperature, and security systems.
- Assistive Robotic Arm: Build a robotic arm to aid individuals with limited mobility in performing daily tasks, such as eating, gripping objects, or writing.
- Automated Agricultural Monitoring: Develop a system that utilizes sensors and data analysis techniques to monitor soil moisture, temperature, and plant health, enabling better agricultural management.
- Gesture-based Human-Machine Interface: Create an intuitive interface using gesture recognition technology to control electronic devices, eliminating the need for physical contact.
- Robotic Exoskeleton for Rehabilitation: Design a wearable exoskeleton that offers assistance and rehabilitation for individuals with mobility impairments, improving their quality of life and facilitating recovery.
- Autonomous Surveillance Robot: Construct a mobile robot equipped with cameras and sensors capable of patrolling designated areas and detecting suspicious activities or intrusions.
- Intelligent Traffic Management System: Develop a smart traffic management system that utilizes real-time data and AI algorithms to optimize traffic flow and reduce congestion.
Remember, these project ideas are meant to spark your creativity and serve as a starting point for your own unique project. Feel free to modify or combine them to align with your specific interests and goals. Good luck with your mechatronics engineering journey!
Five Finger Myoelectric Anthropoid hand
Our mission is to enhance the functionality and usability of MYO-electric prosthetic hands for individuals with limb differences. Our project focuses on the development and implementation of an advanced MYO-electric hand with a range of customizable grip patterns, tailored to meet the unique needs and preferences of each user.
To achieve our objectives, we have identified several key areas for improvement. First and foremost, we aim to optimize the design of the hand, ensuring a comfortable fit and natural range of motion. We will also refine the electrical circuitry, enhancing its efficiency and reliability for seamless control and feedback.
In addition, we plan to introduce an intuitive control system that allows users to easily switch between different grip patterns based on their specific tasks and activities. By incorporating advanced sensor technology and intelligent algorithms, we can achieve precise finger positioning and responsive movement.
Aesthetics is another aspect we prioritize, as we believe that the aesthetic appeal of prosthetic devices plays a crucial role in boosting users’ confidence and acceptance. We will work towards creating a sleek and visually appealing design that resembles the appearance of a natural hand as closely as possible.
Through a multidisciplinary approach that combines expertise in mechanics, electronics, control systems, and user experience, we are confident in our ability to create a state-of-the-art MYO-electric hand that significantly improves the quality of life for individuals with limb differences.
Flapping Wing Unmanned Aerial Vehicle (UAV)
unmanned lead vehicle.
The purpose of this project was to develop both hardware and software components for a highly versatile semi-autonomous vehicle. This vehicle has been specifically designed to excel in various applications, including both rescue missions and military operations. By integrating state-of-the-art technology and advanced algorithms, the vehicle offers unparalleled performance, efficiency, and reliability. Whether it’s traversing challenging terrains or navigating through complex environments, this vehicle is equipped to handle it all. Its cutting-edge features and robust design make it an invaluable asset in critical situations, ensuring the safety and success of missions.
- Making the quad-bike vehicle autonomous by Implementing Model Predictive Control (MPC).
- State space Modeling and Simulation of vehicle in visual studio and Webots.
- IBVS technique used for controlling the motion of vehicle.
- Target Tracking of any desired object in OpenCV.
- I recommend mechatronics engineering students to have a look on this project.
Unmanned Ground Vehicle (UGV)
Unmanned Ground Vehicles (UGVs) are vehicles that operate without the presence of an onboard human. They are specifically designed to navigate and carry out tasks on the ground autonomously. UGVs have become increasingly popular in various industries and applications where it may be inconvenient, hazardous, or simply not possible for a human operator to be physically present.
One notable field where UGVs excel is in mechatronics engineering projects. These projects often involve the development and control of versatile terrain platforms with flipper arms for enhanced mobility. These platforms are equipped with advanced features such as bomb-disposal capabilities and the ability to assist in urban search and rescue operations. The integration of a 6 degree of freedom manipulator allows for precise and intricate tasks to be performed.
Additionally, we worked on a small UGV that can be thrown into urban environments for surveillance purposes. This compact and agile UGV enhances situational awareness and enables effective monitoring in challenging urban terrains. Its ability to navigate and gather real-time intelligence in urban settings proves to be invaluable for various applications.
UGVs continue to advance in technology and find novel applications across different industries. Their autonomous capabilities and versatility make them a promising solution for tackling complex tasks and improving operational efficiency.
Design and fabrication of Aerial Robot (quadcopter) for condition monitoring of paved surfaces.
Quadcopters, also known as multi-rotor aerial vehicles, are commonly used for aerial imaging and surveillance purposes. In this project, we have developed a quadcopter specifically designed to detect cracks in roads and pavements. Our innovative solution incorporates various tasks and features to ensure accurate crack detection.
- Designing and fabrication of quadcopter
- PID control and stabilization of vehicle
- Implementation of crack detection algorithm
Domestic Assisting Robot using ROS and iCreate
The domestic assisting robot is designed and built with the Robocup@Home league in mind. Its primary purpose is to assist users in a domestic environment by performing various tasks. These tasks include facial recognition, user identification, speech recognition, obstacle avoidance, and local area mapping. The robot is based on the iCreate platform and utilizes ROS (Robot Operating System) for software and control. With its advanced features and capabilities, the robot provides seamless assistance and enhances the overall domestic experience.
Development of Manipulator, control and Analysis of Unmanned Ground Vehicles.
The objective of this project is to design and construct a 4DOF manipulator that can be mounted on a tele-operated SUGV (Small Unmanned Ground Vehicle). The manipulator consists of three revolute joints, making it an RRR manipulator. Furthermore, it is equipped with a versatile gripper capable of securely grasping and releasing objects of varying sizes, with a maximum weight capacity of approximately 4 to 5 kilograms. To enhance situational awareness, a surveillance camera is integrated onto the manipulator, providing live video feed to the operator.
To facilitate control and operation, a user-friendly GUI has been developed using the C# programming language. This interface allows the operator to effortlessly control the UGV and its manipulator, while simultaneously providing a real-time display of the camera feed. To ensure structural integrity, a comprehensive static analysis has been conducted to anticipate and address any potential stresses that may arise within the manipulator, SUGV, and TREC UGV.
In order to maintain precise control, a closed-loop control system has been implemented, which utilizes encoders to provide feedback and regulate the SUGV’s drive. This ensures accurate positioning and maneuverability of the robotic system.
Overall, this project aims to deliver a robust and versatile manipulator system that enhances the capabilities of the tele-operated SUGV, enabling it to perform a wide range of tasks with efficiency and precision.
Elevator Control and Conveyer Control System using PLC
The elevator system is controlled using Siemens’ S7-1200 PLC, offering efficient and reliable operation. This advanced PLC programming technology supports the automation of elevator functions, including the management of three-story buildings and door systems. The system follows the FIFO (First In, First Out) principle to efficiently handle incoming requests.
For the conveyor system, an Allen Bradley PLC is utilized. The conveyor sensor plays a crucial role in detecting objects, ensuring seamless and accurate functionality. To enhance the performance of the conveyor system, a pre-fabricated simulator with a 24-volt DC motor is incorporated, allowing precise control and efficient stamping operations.
By integrating these advanced technologies, the elevator and conveyor systems achieve optimal performance, enabling seamless and reliable operations in various industrial settings.
*[PLC]: Programmable Logic Controller *[DC]: Direct Current
Brain Computer Interface
A brain-computer interface (BCI) is a fascinating technology that allows individuals to communicate with the outside world by decoding electronic signals from the brain.
In our project, we have developed an advanced 6-degree-of-freedom upper limb prosthesis that incorporates an asynchronous online BCI system. This innovative system can acquire real-time brain signals and effectively differentiate between different types of movements based on these signals.
By harnessing the power of this BCI technology, individuals can regain control and functionality of their limbs, greatly enhancing their quality of life. This remarkable breakthrough not only showcases the potential of BCI in the field of prosthetics but also opens up new possibilities for human-computer interaction.
- Opening of hand
- Closing of hand
The developed prosthesis is capable of providing adaptive gripping on individual fingers.
On-Board Diagnostic Scanner for IVECO LRV
The On-Board Diagnostic Scanner, or OBD, is a device used to detect Data Trouble Codes (DTCs) generated by a vehicle’s Electronic Control Unit (ECU). It also performs PID tests to check the performance of the vehicle. The primary goal of this project is to establish communication with the IVECO’s ECU and develop a scanner with the following features:
- Efficient Communication: The scanner ensures reliable and fast communication with the vehicle’s ECU, allowing for quick and accurate diagnosis of any issues.
- Comprehensive Diagnostic Capabilities: It is equipped to read and interpret a wide range of DTCs, providing detailed information about specific problems within the vehicle’s systems.
- Real-Time Monitoring: The scanner offers real-time monitoring of various parameters, enabling users to analyze live data and identify potential malfunctions or abnormalities.
- User-Friendly Interface: With an intuitive and user-friendly interface, the scanner simplifies the diagnostic process, allowing even non-experts to effectively use the device.
- Wide Compatibility: It supports a variety of IVECO vehicle models, ensuring compatibility with different makes and models within the IVECO range.
By investing in this advanced OBD scanner, users can effectively troubleshoot issues, improve vehicle performance, and save time and money on unnecessary repairs.
- Checks the different parameters of the vehicle (PID’s).
- Checks the DTC’s (Data Trouble Codes) generated by the ECU.
Hybrid Prosthetic Limb (Wrist Joint)
The Myo-Electric prosthesis is a device specially designed for the amputees to provide them a replacement for the conventional artificial limb. The patient is able to perform natural motary movement of hand and wrist using the device. The hybrid prosthesis (wrist joint) is based on the incorporation of wrist joint in the hybrid prosthetic limb. The design of wrist joint encompasses the mechanical design and analysis, electrical design and simulations and implantation of control followed by manufacturing of actual model. The 1 DOF writs joint is manufactured and 3DOF wrist joint have been designed and analyzed. This is very famous project among mechatronics engineering students.
Segway Electric Vehicle
Segway electric is a to wheeled, self-balancing human transporter. It is an effective mode of transportation for shorter distances. It has low cost, uses no fuel, reduces human exertion, and is an environment friendly vehicle.Our project includes the design, fabrication and control of Segway vehicle. we have produced a fully-operational Segway with a compact design and an efficient control system.
Navigation, Human Tracking and Object manipulation by Mobile Robot in Unknown Environment
This project idea focuses on the navigation of mobile robot in an indoor stochastic environment by the implementation of Simultaneous Localization and Mapping (SLAM) Algorithm on a Roomba ICreate based Robot using the Robotic Operating System (ROS) Environment. The project also focuses on using motion planning algorithm to pick up simple objects using 4-DOF manipulator and skeletal tracking of humans in an unknown environment. The aim of this project is the integration of robots in human lives with development of service and assistive robot that can be used in the home environment.
Robotic Powered Ankle Foot Prosthesis
Prosthesis is an artificial device that replaces a missing or injured part of one’s body. We have catered the problem of below knee amputation. EMG based control is implemented to achieve desirable results. An agronomic design with actuators and motors takes care of movement in which feedback and control of the input is based on output from sensors. The purpose of this project is the development of assistive robotic prosthesis that can be used by amputated people in everyday environment to obtain natural gait. It can also be used as a research object, based on which better products can be developed for the betterment of human lives. Developed general prototype after modification and further research would be ready to get commercialized on the prosthetic market.
Wireless Communicated Simulation Mine
We are developing a system mechatronics engineering based which will help to train army personals to detect land mines effectively and furthermore, will give birth to better mine detection system. The equipment used involves a casing which is of the size of a landmine which in capsules an Arduino mini pro microcontroller , a Force resistive sensor which is mounted on top of the casing for sensing if load is placed on top and a RF transceiver.As soon as a mine is stepped on, it will transmit a signal, containing the address of that mine to the Control Room. The control room microcontroller will then receive the code and raise a flag on the GUI, which is built in Matlab.
Fabrication of an automated elbow joint
The need of an automated elbow joint was established when we realized that the user needs to be able to control both hands independently. Our project involves the design of a gearbox that enables the user to easily life up to 5 kg load using the artificial arm.We have also ensured that the arm is compatible with other projects of prosthesis allowing easy interface between them and this product.
Several types of hands have been designed to mimic the dexterity of human. Mechanical grippers have been widely used because of light weight and consuming less energy, as prosthetic tools to replace missing carpals. To ensure the reliability of the grip force, the gripper should have sufficient strength and stiffness. This gripper has ne actuator. This gripper comply with the medical development and is worthy of consideration.
Improvement of an On-board Diagnostic (OBD) Scanner for Troubleshooting of Complaint Vehicles
Our project deals with the improvement of the indigenously developed generic On Board Diagnostic Scanner and its working on Honda staff car & other vehicles. We use a laptop to interact with our scanner using RS-232 (Serial) communication. This scanner shows the live vehicle parameter, including rpm of engine, battery voltage, speed, throttle pedal position, intake air temperature etc. as well as the diagnostic trouble codes for different passenger vehicles and military vehicle Land rover defender. We have developed a flexible and easy to use GUI which acts as an interface b/w the Engine Control Unit of a vehicle and user. This scanner helps the mechanism and user s to get information about the vehicle parameters and check the faults if any known as Diagnostic trouble Codes (DTCs). The scanner also include service functions which are present in the HONDA OEM diagnostics scanner including VTEC test, ETCS, A/C clutch test, Fuel Pump test, and other functional tests.
Study and development of Android Application for OBD-II
On-Board Diagnostics (OBD) is a term used to describe the self-diagnostic and reporting capabilities of modern automotive vehicles. It enables the vehicle’s electronic control unit (ECU) to perform thorough diagnostics and provide essential data for troubleshooting and maintenance purposes.
In our research, we have developed an efficient procedure for extracting data from the ECU using a custom-built scanner. The scanner, equipped with a standard Bluetooth module, establishes a connection to an Android phone. Through this wireless connection, the scanner sends commands to the ECU to retrieve diagnostic information.
Once the ECU responds, the scanner securely transmits the data to the Android application we have developed. This user-friendly application decodes and presents the diagnostic information in a comprehensible format on the smartphone screen. By leveraging this OBD-II solution, users can easily monitor the status, performance, and health of their vehicles.
Our innovative solution simplifies the diagnostic process, empowering vehicle owners to make informed decisions about maintenance and repairs. By providing real-time access to vital information, our OBD-II solution ensures optimal vehicle performance, enhances safety, and helps users stay ahead of any potential issues.
With this advanced technology, users can gain deeper insights into their vehicles, enabling them to take proactive measures to maintain and prolong the lifespan of their cherished automobiles.
Share this:
- Click to share on Facebook (Opens in new window)
- Click to share on LinkedIn (Opens in new window)
- Click to share on Twitter (Opens in new window)
- Click to share on Tumblr (Opens in new window)
- Click to share on Pinterest (Opens in new window)
- Click to share on WhatsApp (Opens in new window)
- Click to email a link to a friend (Opens in new window)
Subscribe to Blog via Email
Enter your email address to subscribe to this blog and receive notifications of new posts by email.
Email Address
13 thoughts on “Mechatronics engineering projects ideas for final year students”
Hii aslamoalikum how are you brother ???? I am student of mechatronics engineering final year student so plzz I want some help from you for my final year project so plzz can u give me your cell number or email where I can talk to you privately…
I hope you got your answer
Can You Suggest me Some Good Projects for Final Year Mechatronics with LOW BUDGET… Please… Thank You..
Electrical branch of knowledge is contracted for by an desolate to gat back in shape the skills in the what one is in to of electricity. Electrical courses helps in imbibing the habit of landscape up strength at a connect or repairing a inaccurate point. Further habit in the employment can even uphold in the betterment of electrical technology.
can you give some good msd project with details(synosis ) ,.pls… give ur no
Hi, can you suggest to me the topic i can carryout research and simulation with modeling of for undergraguate programme.
Can you suggest some topics for research/thesis with simulation (not hardware project topic) for undergraduate program.
Hii aslamoalikum how are you brother ???? I am student of mechatronics engineering final year student so plzz I want some help from you for my final year project so plzz can u give me your cell number or email where I can talk to you privately…
Your contents are completely awesome and share worthy. I really appreciate your efforts that you put on this. Keep sharing.
Hey, I’m a final year student in Mechatronic Engineering and i need help, please can you suggest some good low budget project topics for me. Thank you
Hey I’m a final year student in Electromechanical engineering and I want a help please ,can you give me a suggest thesis title? thank you!
can you suggest me a good project for my final year
HI, I am Final year Mechatronics student . Can you suggest me final year project ideas ?
Leave a Comment Cancel reply
Notify me of follow-up comments by email.
Notify me of new posts by email.
Advertisement
- Preferences

Mechatronics Topics PowerPoint PPT Presentations

Penn State University Libraries
Mechatronics.
- Finding Articles
- Finding Books
- Finding Industry, Market, Company, & Product Data
- Finding Patent & Intellectual Property Information
- Recommended Journals (online only)
- Recommended Books
- Tips for Writing, Presentation, and Drafting
- Other Resources
STEM Librarian

Writing and Presentation Resources
- Citation and Writing Guides An in depth guide to a variety of writing and citing tools.
- Penn State Harrisburg Learning Center Teaches you methods for proofreading your work.
- Scientific and Technical Reports - Preparation, Presentation, and Preservation Standard (NSI/NISO Z39.18-2005 (R2010)) PDF download. Outlines the elements, organization, and design of scientific and technical reports. Provides guidance on format and style.

- Library catalog search for more items on technical writing This link performs a search in the Penn State library Catalog for books on writing for engineers and scientists.
- Library catalog search for items on professional development for engineers This link performs a search in the Penn State library Catalog)for books on career exploration, communication, exam preparation, and other student concerns.
Drafting and Drawing Resources

- Library catalog search for more items on engineering drawing
- << Previous: Recommended Books
- Next: Other Resources >>
- Last Updated: Sep 25, 2023 8:21 AM
- URL: https://guides.libraries.psu.edu/mechatronics
Browse Course Material
Course info.
- Prof. David Trumper
Departments
- Mechanical Engineering
As Taught In
- Digital Systems
- Electronics
- Robotics and Control Systems
- Dynamics and Control
- Mechanical Design
Mechatronics
Course meeting times.
Lectures: 2 sessions per week, 1.5 hours per session
Labs: Self-scheduled
Description
This course is an introduction to designing mechatronic systems, which require integration of the mechanical and electrical engineering disciplines within a unified framework. There are significant laboratory-based design experiences. Topics covered in the course include: Low-level interfacing of software with hardware; use of high-level graphical programming tools to implement real-time computation tasks; digital logic; analog interfacing and power amplifiers; measurement and sensing; electromagnetic and optical transducers; control of mechatronic systems.
Prerequisites
We assume that you have taken a course in frequency-domain based control system design. Examples include:
- 2.14 Analysis and Design of Feedback Control Systems
- 6.302 Feedback Systems
- 16.06 Principles of Automatic Control
Specifically, you need to be able to design control loops for performance and stability using concepts of loop shaping via lead / lag controllers. You should also know about root locus and Nyquist analyses.
We also assume that you have a basic familiarity with electronic circuits and operational amplifiers. Either of these courses:
- 6.002 Circuits and Electronics
- 6.071J Introduction to Electronics, Signals, and Measurement
Laboratory Assignments
The class will use LabVIEW —based control electronics, and it will be best if you have a running version of LabVIEW 2013 installed on Windows on your own laptop. We do not assume prior experience with LabVIEW, but you will need to learn it during the course. MIT students borrow an NI myRIO unit during the course.
We will occasionally use the scheduled lab sessions, but you will mostly work in the lab on a self-scheduled basis. If you are a registered student in the class, and once we set up the access list, your MIT card key should give you access to the lab. This freedom to use the facility also entails the responsibility to take good care of it. Please be sure the lab is locked when you leave it. Do not let others into the lab; registered students should be able to get in with their own MIT ID. Please let us know if something is wrong with any of the equipment, and be careful to leave the lab benches and equipment ready for the next person to use. When you leave, please be sure equipment other than the computers is powered off.
A pre-lab will be assigned in the week preceding the lab exercise. The pre-lab will help you to get prepared and make calculations and design choices for the laboratories. The pre-lab may also contain homework-like problems. The pre-lab is generally due in class one week after the lab assignment goes out. Late pre-labs will not be accepted. Please turn in a copy of your work to us, retaining the original, as you will generally need the pre-lab material for your lab experiments. Attach the original of your pre-lab to the back of the lab report, to be turned in at the lab check-off.
Lab Reports
Your lab report is due at a scheduled check-off with one of the teaching staff. This check-off consists of a 30 minute interview in which we will ask you to demonstrate your working lab experiments. Check-offs will be scheduled about a week in advance. Please come to the lab well in advance of your check-off to be sure that you have a properly functioning lab setup in order to be able to demonstrate your system, and make good use of the 30 minute time window. Lab check-offs will not generally be rescheduled other than in the event of an emergency or illness. Late lab reports will not be accepted.
Final Project
The final project will take place in the last 3.5 weeks of the semester. You can work in groups of 2–3 people for this project. The project will be of your own definition, although we have a number of example systems you can work with if desired. The final project will count the same as two labs, and will include a presentation to the class.
Every team will have 30 minutes, with 15 minutes presentation with slides and 15 minutes hardware demo, plus questions and answers. Please come early to prepare the hardware and rehearsal your talk to make sure it fits the time constraints.
Some suggestions for the slides: It will be good if you present the hardware overall design, major results, and any take-home message that you want to deliver in the first slide. It is a great way to catch the attention of your audience.
The grade of each lab is based upon the pre-lab (30%), check-off (35%), and lab report (35%) scores.
Collaboration Policy
Collaboration in the form of discussion between students is permitted and encouraged in all aspects of the course. You can learn a great deal from the perspectives of others in the class. However, what you turn in for pre-lab, lab, and project reports must be your individual solution. The check-offs are one-on-one, and give you a chance to show us your own understanding of the material. If you make use of insights from another student, good scholarship entails citing their contribution in your report. We will think more highly of you if we see such assistance acknowledged.

You are leaving MIT OpenCourseWare
IEEE/ASME Transactions on Mechatronics
The IEEE/ASME TRANSACTIONS ON MECHATRONICS (TMECH) is a bimonthly periodical that began as a quarterly in 1996 as a joint publication of the IEEE Industrial Electronics Society, IEEE Robotics and Automation Society, IEEE Lasers and Electro-Optics Society, ASME Dynamic Systems and Control Division, and ASME Design Engineering Division. The aim of the present transactions is to establish a high-quality archival journal which presents the state of the art, recent advances and practical applications of mechatronics. Its scope encompasses all practical aspects of the theory and methods of mechatronics, the synergetic integration of mechanical engineering with electronic and intelligent computer control in the design and manufacture of industrial products and processes. The covered ten technical areas included are:
- Actuators and Sensors
- Automotive Systems
- Intelligent Control
- Manufacturing
- Micro Devices and Opto-electronic Systems
- Modeling and Design
- Motion Control
- System Integration
- Vibration and Noise Control
and other applications that involve novel and synergistic integration of information processing, electronics and mechanical devices with engineered and/or non-engineered systems.
Early Access TMECH articles, popular articles, and all other past and present articles, can be found on IEEE Xplore.
Please read the Information for Authors before preparing and submitting a manuscript.
On-line manuscript submission: http://mc.manuscriptcentral.com/tmech-ieee
TMECH's Scope
The IEEE/ASME Transactions on Mechatronics publishes high quality technical papers on technological advances in mechatronics. A primary purpose of the IEEE/ASME Transactions on Mechatronics is to have an archival publication which encompasses both theory and practice. Papers published in the IEEE/ASME Transactions on Mechatronics disclose significant new knowledge needed to implement intelligent mechatronics systems, from analysis and design through simulation and hardware and software implementation. The Transactions also contains a letters section dedicated to rapid publication of short correspondence items concerning new research results.
2024 Best Paper Award Update
The 2024 TMECH Best Paper Award co-winners and finalists have been posted.
Our congratulations go out to the authors.
Upcoming Focused Sections
The Fifth Edition of the Focused Section on TMECH/AIM Emerging Topics
Opens Nov. 1, 2023
AIM 2024 Call for Papers
Contributed and Invited Papers and TMECH Presentation Only Due February 8, 2024
Mechatronics
Simplest definition of Mechatronics is the combination of mechanisms or mechanical motions with electronics. A mixture of mechanical engineering and electronics engineering to achieve more complex operations in robotics and automation.
#TrendingMechatronicsIdeas

- Pneumatic Arm Hammer Attachment With Nail Puller
- Motorized Solar Scarecrow Bird Animal Repellent
- Solar Wireless Electric Vehicle Charging System
- Solar Powered Water Trash Collector
- Water Pollution Monitoring RC Boat
- Arduino Covid Disinfection Box
- Solar SeaWater Desalination Machine
- Silent Air Purifier & Humidifier
- Weather Imaging CubeSat with Telemetry Transmission
- Design and Fabrication of Automatic Pneumatic Ramming Machine
- Design and Fabrication of Emergency braking system in Four-Wheeler
- Arduino based Snake Robot Controlled using Android Application
- Electromagnetic Braking System
- Solar SeaWeather and Pollution Transmitter Buoy
- Automatic Wire Cutter And Stripper Machine
- Automatic Sugarcane Bud Cutter Machine
- Coin Operated Water ATM with Bottle Dispenser
- DIY Automatic Screen Printing Machine
- Cam Shaft Mechanism DIY Ventilator
- Contactless Switch For 4 Load Switching
- 3D Scanner Machine using Arduino
- 4 Slot Coin Operated Cola Vending Machine
- Auto Dough Maker Dough Kneading Machine
- Colour Product Sorting using Pneumatic Conveyor belt
- Variable Head Solar Grass Cutter Weed Trimmer
- 360 Degree Fire Protection System
- 8 Leg Spider Robot by Theo Jansen Linkage
- Arduino Multi Player Air Hockey Table
- Goods Transport Stair Climber Robot
- Programmable Robotic Arm Using Arduino
- Football Shooter Soccer Ball Launcher Machine
- Mini Belt grinder Project
- Flamethrower & Extinguisher RC Robot
- Four Wheel Steering Mechanism Project
- Regenerative Breaking With Power Monitor
- Mini Mechanical Wire & Rod Cutter Machine
- Head Tilt Controlled Wheelchair for Disabled
- RC Solar Lake Pool Cleaner Drone
- Advanced Mosquito Killer Machine
- Portable Induction Cooktop With Time/Temp Settings
- Three Axis CNC Machine 1 Meter x 2 Meter
- Oil Skimmer RC Boat
- Electromagnetic Coil Gun 3 Stage
- Automatic Coil Winding Machine
- Off Road Adventure Robot with Action Camera
- Waterproof Action Camera Drone
- Solar Panel Cleaning Robot
- IOT Water Pollution Monitor RC Boat
- Indoor Farming Hydroponic Plant Grow Tent
- Voice Controlled Air Purifier
- Automatic Hydroponic Plant Grow Pot
- Rain Sensing Hands Free Umbrella Bag
- LIDAR Micro Done With Proximity Sensing
- Automatic Self Folding Dining Table
- RC Underwater Exploration Drone
- SeaWave Power Generator With Solar
- Wall Climbing Glass Cleaner Robot
- Sustainable Fishing Drone Without Bycatch
- Portable Electric Power Tiller Machine
- IOT Syringe Infusion Pump
- Self Charging Solar Powered Drone
- Auto IV Pole with IV Bag Refill Alert
- Pesticide Sprayer & COVID Sanitization Drone
- Thermal Vision RC Robotic Tank
- Medical Supplies Delivery Drone
- Dual Side Potato Fries Maker Machine
- Mattress Cleaning Machine
- Automatic Potato Peeling Machine
- IOT Weather Station Airship
- Fishing Drone
- Portable 3 in 1 Car Washer & Wiper
- Portable Air Compressor with Auto Cutoff
- Floating Sun Tracker Hydraulic Solar Panel
- AI Bartender Cocktail Maker Machine
- IOT Dog Daycare Robot
- Indoor Racing Drone with Action Camera
- DIY Tricopter Selfie Drone
- Rough Terrain 3 Wheel Electric Bike
- Unique Hubless Ebike With Suspension
- Anti Riot Shield With Pepper Spray & Blinding
- 360° Aerial Surveillance UAV With IOT Camera
- 360° Filmmaking Drone For 4K HD Video
- Solar Outdoor Air Purifier & Air Quality Monitor
- Fire Extinguisher & Fire Fighting Drone
- Semi Automatic Back Massager Machine
- Arm Mounted Hammer Drill Machine
- 360° Welding Cutting Rotary Turn Table Positioner
- Indoor Farming Hydroponic Plant Grow Chamber
- Portable PPE Kit Sterilizer Ozone + UV
- Thermal Screening Drone
- Dual Mount Auto Sanitizer Dispenser
- Autonomous Theft Proof Delivery Robot For Food & Ecommerce
- Social Distancing & Mask Monitor Drone
- DIY Oxygen Concentrator Generator For Covid 19
- DIY Ventilator using Arduino For Covid Pandemic
- Water Landing and Take-off Drone
- 2WD Vehicle Drone Air + Land Surveillance
- Public Property Violation and Anti Littering Drone
- Farm Protector Drone for using Arduino
- Automatic Liquid Dispenser Vending Machine
- Design and Fabrication of External Pipe Climbing Robot
- Anti-Riot Drone with Tear Gas
- Multi-purpose Sea Surveillance + Search & Rescue RC Boat
- Expandable Transforming Ebike 1 to 3 Seater
- Automatic Rain Water Sensing Umbrella
- Pollution Monitoring & Source Tracker Drone
- Intelligent Surveillance and Night Patrolling Drone
- DIY 5DOF Wireless Hand Motion Controlled Robotic Gripper Arm
- Automatic Waste Segregation System
- Power Saving System for Lathe
- Garbage Collection Robot Using Wireless Communication Technology
- Design and Manufacturing of Solar Powered Seed Sprayer Machine
- Quadriplegics Wheelchair Control by Head Motion using Accelerometer
- Design and Fabrication of Mini Groundnut & Peanut Shelling Machine
- Air Powered Mini Wall Climbing Robot Project
- 20 Liter Jar Automatic Cleaning and Washing machine
- Automatic Automobile Brake Failure Indicator with Buzzer
- Design and Fabrication of Vertically Wall Climbing Glass Cleaning Robot
- Alcohol Detection with Go Kart Ignition Locking Project
- Pneumatic Reciprocating Power Hacksaw Machine Project
- Pneumatic Paper Cup Making Machine Project
- Design and Fabrication of Battery Powered Monowheel
- Pneumatic Powered Metal Pick and Place Arm
- Six Legged Spider Bot using Klann Mechanism
- IOT Color Based Product Sorting Machine Project
- Wireless Humanoid Bionic Arm on Robotic Vehicle
- RF Controlled Beach Cleaner Robotic Vehicle
- E Skateboard With Motion Sensing
- Pneumatic Powered Wall Climbing Robot
- Remote Controlled Mini Forklift
- Rough Terrain Vehicle Using Rocker Bogie Mechanism
- Motorized Chain Mechanism Hacksaw
- Coin Based Cola & Soda Vending Machine
- Automatic Vacuum Cleaner Robot Project
- Design & Fabrication of Automated Punching Machine
- Design & Fabrication of Motorized Scissor Jack
- Rough Terrain Beetle Robot
- Mini Windmill Power Generation Project
- Steering Mechanism Vehicle With Joystick Control
- Plant Irrigation Water Sprinkler Robot
- Automatic Seed Sowing Robot
- Design & Fabrication of Attachable Wheelchair Automator
- 2 Wheel Drive Forklift For Industry Warehouses
- Smart Solar Grass Cutter With Lawn Coverage
- Bedini Wheel Using Electromagnetic Flux Generation
- High Performance Hovercraft With Power Turning
- Automated 5Dof Robotic Arm Mechanism
- Automated Coconut Scraping Machine
- Automated Double Hacksaw Project
- Pedal Powered Water Purifier Project
- Automatic Blackboard / Whiteboard Cleaner System
- Automated Drain/Gutter Cleaner Project
- Automatic MotorBike Stand Slider
- Contactless Eddy Braking System
- Gearless Transmission Using Elbow Mechanism
- Pulley Based Movable Crane Robot
- Push Based Box Transport Mechanism
- Sand Filter & Separator Project
- Fire Fighter Robot With Night Vision Camera
- Long Range Spy Robot With Night Vision
- Long Range Spy Robot With Obstacle Detection
- Long Range Spy Robot With Metal Detection
- Remote Controlled Automobile Using Rf
- Remote Controlled Robotic Arm Using Rf
- Android Controlled Robotic Arm
- Hand Motion Controlled Robotic Arm
- Hand Motion Controlled Robotic Vehicle
- Rf Controlled Spy Robot With Night Vision Camera
- Hovercraft Controlled By Android
- Fully Automated Solar Grass Cutter Robot
- Remote Controlled Pick & Place Robotic Vehicle
- MC Based Line Follower Robot
- Agricultural Robot Project
- Mini Conveyor Belt Mechanism
- Dual Motor Electric Go-Kart For Rough Terrain
- Fire Fighter Robot Project
- Motorized 2 Wheel Scooter Project
- RF Controlled Robotic Vehicle
- RF Controlled Robotic Vehicle With Metal Detection Project
- Obstacle Avoider Robotic Vehicle
- Voice Controlled Robotic Vehicle
- Question Papers
- Scholarships
1000+ Electronics Engineering Presentation Topics
These are 1000+ Presentation Topics for Electronics Engineering Students, Researchers, Teachers, and other professionals. Here we have given the latest and best electronics engineering presentation topics which can be used for PowerPoint paper presentations, seminars, webinars, oral or PPT presentations and discussions.
List of presentation topics for electronics engineering
These are the latest Presentation Topics for Electronics Engineering students.
Table of Contents
3G vs WiFi Wireless Internet Access
4G Wireless technology
5G Wireless technology
64-Point FT Chip
Air Powered Car
All-Optical Transistor
An Optical Switch Based on a Single Nano-Diamond
Artificial retina using thin-film transistor technology
Automatic solar tracker
Bio Battery
Brushless DC motor
Bubble Power
Carbon Nanotubes
Cellular Radio
Concentrating collectors
Detection and Tracking Algorithms for IRST
Digital Imaging
Drawing and Writing in Liquid With Light
DSP based motor control
E-Paper Technology
Electronics advance moves closer to a world beyond silicon
Electrooculography
Embedded system in automobiles
Embedded System Security
Fractal Robots
High-Speed Packet Access (HSPA)
How Advanced Solar Cells Work?
Humanoid Robot
IBOC (In-band on-channel)
Impedance Glottography
Integrated Circuits: The Dominator of Electronics
Is the electronics sector still waiting for the economy to recover?
Kirlian photography
Matrix inversion generator architecture
Microelectronic Pill
MIMO Technology
Mobile Phone Cloning
Money Pad Future Wallet
Nano-Optics
Nanomachines
New Techniques Produce Cleanest Graphene
The new way to dissolve semiconductors
Next-Generation Semiconductors Synthesis
Observer-Based Sensorless Control
Paper battery
Plastic Photovoltaics
Plastic Semiconductors
Riding an electron wave into the future of microchip fabrication
Smart antennas
Synaptic transistor
The power of wireless devices
Turning Plastic Bags Into High-Tech Materials
Use of DNA to assemble a graphene transistor
Wireless Communication technologies
Witricity (WIRELESS ELECTRICITY)
Wi-Vi technology
World’s Smallest FM Radio Transmitter
More Electronics Engg. Topics (Alphabetical List)
Here is the list of thousands of presentation ideas for presentations for electronics and telecommunication engineering students.
21st Century Electronic Devices
3 Axis Digital Accelerometer
3- D IC’s
3-D Chip Stacking Technique
3D Internet
3D optical Data Storage Technology
3D Solar Cell Technology
3-Dimensional Printing
3G Vs. 4G mobile Networks
5G Wireless Systems
6.5 digit professional multimeters
A 64 Point Fourier Transform Chip
A Basic Touch-Sensor Screen System
AC Performance of Nanoelectronics
Accident identification with auto dialler
Acoustic to articulatory inversion
Active pixel sensor
Adaptive Active Phased Array Radars
Adaptive Blind Noise Suppression
Adaptive Cruise Control
Adaptive Missile Guidance Using GPS
Adaptive Multipath Detection
Adaptive Optics in Ground-Based Telescopes
Adhoc Networks
Advanced electronic war equipment
Advanced Mobile Presence Technology
Advanced Packet Classification Technique
Advanced Plastics
Advances in DCS Systems
Advances in motion-capture technology
Advances in Thin-Film Technology
Advertising display using LED & LCD
AFM ultrafast Imaging
Agricultural Plant watering systems
AI for Speech Recognition
Air pollution monitor
All-flash microcontrollers
Aluminum Electrolytic Capacitors
Amplifiers: single-and multi-stage
An Efficient Algorithm for iris pattern
Analog Circuits
Analogue CMOS
Analog Gyros
Analog-Digital Hybrid Modulation
Analog-Digital Hybrid Modulation for improved efficiency over Broadband Wireless Systems
Analysis of electromechanical systems employing microcomputers
Animatronics
ANN for misuse detection
Antenna Effect in VLSI Designs
Anthropomorphic Robot hand: Gifu Hand II
Antiroll suspension system
Aperture Synthesis (SAR and ISAR)
Application-Specific IC’s (ASICS)
Applications of dual-axis Accelerometers
Applications of Fuel cells
Architectural requirements for a DSP processer
Articulatory synthesis
Artificial Eye
Artificial immune system.
Artificial intelligence for speech recognition
Artificial Intelligence In Power Station
Artificial Intelligence Substation Control
Artificial Neural Network Systems
Artificial neural networks
Aspheric lenses
Astrophotography
Asymmetric digital subscriber line
Asynchronous Chips
Asynchronous Transfer Mode
ATM with an eye
Augmented Reality
Automated eye-pattern recognition systems
Automated Optical Inspection
Automated Remote Data Logger
Automatic Electric billing system
Automatic Number Plate Recognition
Automatic Railway Gate Controller
Automatic taxi trip sensing and indication system through GSM
Automatic Teller Machine
Automotive Infotainment
Autonomous Underwater Vehicle
Avalanche diode
Avalanche photo diode
Baseband processor for licence-free digital PMR radios
Bench top wind tunnels
Bio Telemetry
Bioinformatics
Biologically inspired robots
Bio-metrics
Bio-Molecular Computing
Bioreactors
BIT for Intelligent system design
Blu Ray Disc
Blue Gene Supercomputer
Blue tooth technology
Bluetooth based smart sensor networks
Bluetooth Network Security
Boiler Instrumentation and Controls
Border Security Using Wireless Integrated Network Sensors
Brain Chips
Brain finger printing
Brain-computer interface
Brake Assisting Systems
Broadband Wireless Systems
Broadcasting as a Communication Primitive in Intercommunication Networks
Brushless Motors
Buffer overflow attack: A potential problem and its Implications
Business Process Execution Language (BPEC)
Capacitive Sensors
Carbon Chips
Carbon Nanotube Flow Sensors
Carbon Nanotubes -Adaptations & Applications
Cargo storage in space
Case Modeling
Cauchy’s and Euler’s equations
CCD vs. CMOS – Image
CCD: Charge-coupled device
CDMA & CDMA 1x Ev-Do
Cellonics Technology
Cellular Communications
Cellular Digital Packet Data
Cellular geolocation
Cellular Neural Network
Cellular Positioning
Cellular Technologies and Security
Cellular through Remote Control Switch
Chameleon Chip
Chip Morphing
Chip stacking Technology
Cholestric Flexible Displays(Ch LCDs)
Class-D Amplifier
Clockless Chips
Clos Architecture in OPS
Code Division Duplexing
Code Division Multiple Access
Collision warning system
Common Address Redundancy Protocol
Communication Onboard High-Speed Public Transport Systems
Compact peripheral component interconnect (CPCI)
Computational Optical Sensing and Imaging
Computer Aided Field Of Vision
Computer memory based on the protein
Concentrating Collectors
Contactless energy transfer system
Content-based image and video retrieval
Continuous phase modulation
Control system compensators
Convergence of Microcontrollers And DSPs
Co-operative cache based data access in ad hoc networks
Cordless power controller
Core Connecting Rod Design
Cortex M3 Micro controllers
Cross-media content production
CRT Display
Cruise Control Devices
Crusoe Processor
Cryptology in communication systems
Crystaline Silicon Solar Cells
CT Scanning
CVT: Continuously variable transmission
Cyberterrorism
Data Compression Techniques
Data Loggers
DD Using Bio-robotics
Deep-Submicron Effects and Challenges
Delay Tolerant Networking
Dense wavelength division multiplexing
Design of 2-D Filters using a Parallel Processor Architecture
Development of transistors
Digit recognition using neural network
Digital Audio Broadcasting
Digital Audio’s Final Frontier-Class D Amplifier
Digital Cinema
Digital circuits
Digital filtering techniques-Aliasing
Digital HUBBUB
Digital Micro-mirror Device
Digital quartz MEMS for stabilisation and motion sensing
Digital Signal Processing
Digital steganography
Digital stopwatch
Digital Subscriber Line
Digital Visual Interface
Direct Current Machines
Direct Hydrocarbons for Fuel Cells
Direct to Home Television (DTH)
Discrete-time Fourier Transform
Display technology
Disposable Nano Pumps
Distributed COM
Distributed Integrated Circuits
Distrubuated control System
DLNA: Digital Living Network Alliance Technology
DLP: Digital Light Processing
DNA Based Computing
Driving Optical Network Evolution
DSP Enhanced FPGA
DSP Processor
DTCP: Digital Transmission Content Protection
DTL (Diode–transistor logic)
Dual Energy X-ray Absorpiomsetry
DV Libraries and the Internet
Dynamic virtual private network
Dynamic VPN
Earth Simulator
Earthing transformers For Power systems
EC2 Technology
ECC: Elliptical curve cryptography
ECL (Emitter-coupled logic)
EDGE: Enhanced Data for GSM Evolution
EDRAM: Embedded Dynamic random-access memory
E-Intelligence
Elecromagnetic Valves
Electrical Impedance Tomography Or EIT
Electricity from the sun’s energy – photo-voltaic cells
Electro Dynamic Tether
Electromagnetics
Electronic Cooling and Thermal Issues in Microelectronics
Electronic Data Interchange
Electronic Devices
Electronic exchange& optical fiber network
Electronic humidity sensor
Electronic paper
Electronic Road Pricing System~
Electronic voting machine
Electronics Meet Animal Brains
Electronmagnetic Bomb
Element Management System
Embedded System in Automobiles
Embedded systems
Embedded Systems and Information Appliances
Embedded Systems In Automobiles
Embedded Web Technology
Embryonic approach towards integrated circuits
Embryonics Approach towards Integrated Circuits
Emergency Control of Power systems
Energy efficient turbo systems
Enhanced Data rates for Global Evolution
Enhanced data rates for gsm evolution (edge).
Environmental Remediation Systems
EPG: Electronic Program(me) Guide
EUV Lithography
Evolution Of Embedded System
Extended Markup Language
Extreme ultraviolet lithography
Eye Gaze Human-Computer Interface
Eye gaze systems
Fabrication of Si solar cells for concentrator applications
Face Recognition Technology
Face recognition using artificial neural networks.
Face Recognition Using Neural Network
Fast convergemce algorithms for active noise control in vehicles
Fault Diagnosis Of Electronic System using AI
FDDI: Fiber Distributed Data Interface
FED: field emission display
Femtotechnology
FFT: Fast Fourier transform
Field Emission Display Screens
Field-effect transistors
Field-programmable gate array
FinFET Technology
Finger print based library management system
First order equation (linear and nonlinear)
FLASH PIC micro Micro controllers
Flexible CRT Displays
Flexible Power Gateways
Flip Chip Technology
Floating gate Transistor
Fluid Focus Lens (18)
Fluorescent Multi-layer Disc
Flyash Utilisation
Fly-By-Wire technologies
Flying Robots
FM direction finder
FOC: Fibre Optic Communication
FPGA in Space
FPGA: Field Programmable Gate arrays Technology
Fractal Antennas
Fractal Image Compression
Fractal Robot
FRAM (Ferroelectric RAM)
Free space laser communication
Free Space Optics
Free-Core LVDT Position Sensors
Frequency Division Multiple Access
Fusion Memory
Fuzzy based Washing Machine
Fuzzy Logic
Gaic algorithm for iris comparison
Gas Transfer Systems
Gauss and Green’s theorems
General packet radio system
Genetic Programming
Glass computer memory for reduced cost of medical imaging
Global Positioning System
Global System for Mobiles
GNSS Augmentation Systems
Graphics processing unit
Grating Light Valve (GLV) Display Technology
Greenhouse Gas Control Technologies
GSM Based remote measurement of electricity and control system for home
GSM Security and Encryption
Guided Missiles
Hall Sensor Applications
Handheld Radiation detector
Harsh Environment LVDT Position Sensors
HART Communication
Harvesting Wave power
HBTs: Heterojunction Bipolar Transistors
Heliodisplay
HEMT Modeling and Fabrication
High Altitude Aeronautical Platforms
High Capacity Flash Chips
High-frequency RF design
High Performance Computing On Grid Databases
High Performance DSP Architectures
High Speed Packet Access HSPA
High-Speed Uplink Packet Access (HSUPA)(84)
High-speed USB chips
High-Temperature LVDT
High-availability power systems Redundancy options
Higher-order linear differential equations with constant coefficients
HIPPI (High-Performance Parallel Interface)
HMDI- New Digital Video Interface
Holographic Associative Memory
Holographic Data Storage
Holographic Memory
Holographic Versatile Disc (HVD)
Home Audio Video Interpretability (HAVi)
Home Networking
Homeplug – powerline communication
Hot Standby Routing Protocol (HSRP)
Hot Swapping
Humanoids Robotics
Human-Robot Interaction
Hydrogen Super Highway
Hydrophones
HY-Wire Cars
IBOC Technology
Illumination With Solid State Lighting (4)
Image Authentication Techniques
Image Coding Using Zero Tree Wavelet
Image compression
Image processing techniques in PCB inspection systems
Image Sensors
Imaging radar
Imbricate cryptology
Immersion Lithography
I-Mode (Information Mode)
Implementation of Zoom FFT in Ultrasonic Blood Flow Analysis
Improving Multi-Path Radio Reception
Indoor Geolocation
Infinite Dimensional Vector Space
IN-MOTION RADIOGRAPHY
Innovation at Bell Labs
Instruction detection system
Integer Fast Fourier Transform
Integrated Power Electronics Module
Integrated sensor systems, and radio-frequency systems
Integrated Vehicle Health Management Technology
Integrated Voice and Data
Intel express chipsets
Intelligent RAM (IRAM)
Intelligent Sensors
Intelligent transport
Intelligent Wireless Video Camera
Interactive Voice Response System
Interferometry
Intermediate band quantum dot solar cells
Internet Cryptography
Internet Protocol Television
Intervehicle Communication
Introduction to the Internet Protocols
Inverse Multiplexing over ATM
Ion Conductivity Of Solid Oxide Fuel Cell
Iontophoresis
IP Telephony
Ipv6 – The Next Generation Protocol
IR Tracking Robots
Iris Scanning
IRQ Numbers
ISO Loop magnetic couplers
Isolated PSE controller chipset
Jelly Filled Telephone Cables
Jet Stream windmill
Josephson junction
JTAG Boundary Scan
Junction transistors
Klystron tube
Landmine Detection Using Impulse Ground Penetrating Radar
Laplace transform
Laser communication systems
LCD screen harvests energy from indoor and outdoor light
LCOS Technology
LDMOS Technology
Led Wireless
Lenses of Liquid
Leo Satellite
LIDAR (LIght Detection And Ranging) for Automobile/ industrial/military applications
Light-emitting polymers
Lightning Protection Using LFAM
Linear lumped elements
Linear Time-Invariant (LTI)
Line-Reflect-Reflect Technique
Low Energy Efficient Wireless Communication Network Design
Low Memory Color Image Zero Tree Coding
Low Noise Amplifiers for Small & Large Photodiodes
Low Power UART Design for Serial Data Communication
Low Power Video Amplifiers
Low Power Wireless Sensor Network
Low Quiescent current regulators
Low Voltage Differential Signal
Low voltage differential signaling-Electronics
Low-density parity-check code
Lunar Reconnaissance Orbiter Miniature RF Technology Demonstration
LVDTs for proportional control valve applications
LVDTs for the Power Generation Industry
Magnetic Amplifiers
Magnetic Resonance Force Microscopy(MRFM)
Magnetic Resonance Imaging
Magnetoresistance on nanoscale
Maser Device
Mean value theorems
Media Oriented Systems Transport (MOST) Network
Membranes for Control and Energy Harvesting
MEMS CMOS processing
MEMS Microphone
Mesh Topology
Meso Technology
Metamorphic Robots
Microcontroller based Automatic Flush Control Systems
Microcontroller based security system using sonar
Micro-Display
Micro Electronic Pill
Micro Electronics
Micro Fluidic MEMS
Micro Mouse
Micro Robotics
Micro System Technology in Security Devices
Microbial Fuel Cells
Microcontroller based Auto-Dialer Home Security System
Microcontroller based sky car parking system
Microcontroller based talking key pad for blind people
Microcontroller based traffic density controller
Microcontroller based wireless energy meter
Microelectronic Pills
Micro-fabricated Bio-sensors
Micro fuel Cells
Micromechanical System For System-On-Chip Connectivity
Micro-mirror based projection displays
Microphotonics
Microvia Technology
Micro-wave Based Telecommunication
Microwave Superconductivity
MIFG(Multiple Input Floating Gate)
Migration to 4G: Advantages and Challenges
MiliPede Technology
Military Radars
MILSTD 1553B
Mixed-signal IC’s
MOBILE IPv6
Mobile Processor
Mobile Train Radio Communication
Mobile Virtual Reality Service
Modern Irrigation System Towards Fuzzy
Molecular Electronics
Molecular Fingerprinting
Molecular hinges
Molecular Surgery
Moletronics- an invisible technology
Molten oxide electrolysis
Money Pad, The Future Wallet
MOS (metal-oxide-semiconductor)
MOS capacitor
MOS field-effect transistors
MST in Telecommunication Networks
Multithreading microprocessors
Multichannel DC Convertors
Multimedia Messaging Service
Multiple description coding
Multiple integrals
Multisensor Fusion And Integration
Myword – ‘the text editor’
NAND Flash Memory
Nano Ring Memory
Nano-Communication
Nanocrystalline Thin-Film Si Solar Cells
Nanoimprint Lithography
Nanomanipulation
Nanopolymer Technology
Nanosensors from nature
Nanosized Resonator
Nanotechnological proposal of RBC
Nanotechnology
Nanotechnology Assembler Design
Nanotechnology for Future Electronics
Narrow Band & Broad Band ISDN
Navbelt and Guidicane
NCQ: Native Command Queuing
Near Field Communication
Neo -wafer 3d packaging.
Network Coding
Network on Chip
Neural Networks
Neuroprosthetics
New Applications For Carbon Nanotubes
New Generation Of Chips
New methods to power mobile phones
New Sensor Technology
New trends in Instrumentation
Next Generation Internet
Night Vision Technology
Non Visible Imaging
Nonlinear limits to the information capacity of optical fibre communications
NSAP: Network Service Access Point
Nuclear Batteries-Daintiest Dynamos
NVSRAM- Non-Volatile Static RAM
Object-Oriented Concepts
OCT: Optical Coherence Tomography
Optic Fibre Cable
Optical Burst Switching
Optical Camouflage
Optical Character Recognition
Optical Communications in Space
Optical Ethernet
Optical Integrated Circuits
Optical Mouse
Optical networking
Optical packet switch architectures
Optical Packet Switching Network
Optical Satellite Communication
Optical Switching
Optimization of the sorting architecture of rof
Organic Display
Organic Electronic Fibre
Organic LED
Organic Light Emitting Diode
Orthogonal Frequency Division Multiplexing
Ovonic Unified Memory
Oxygen User technology
PAC: Programmable Automation Controller
Packet Cable Network
Packet Switching chips
Palladium cryptography
Paper Battery
Passive InfraRed sensors (PIRs)
Passive Integration
Passive Millimeter-Wave
Passive Optical Sensors
PC – Based OSCILLOSCOPE
PCD: Protein-Coated Disc
Personal Area Network
Pervasive Computing
PH Control Technique using Fuzzy Logic
Photonic Chips
Photovoltaics
PID (Proportional-Integral-Derivative) control
Piezoelectric Actuators
p-I-n diode
Pivot Vector Space Approach in Audio-Video Mixing
Plasma antenna
Plasma Display
Plasma Television
Plastic circuitries
Plastic electronics
PMR ( Private Mobile Radio) Revolution
PolyBot – Modular, self-reconfigurable robots
Polycrystalline Si solar cells
Polymer memory
Polymer Memory
Polytronics
Porous Burner Technology
Portable X-ray Fluorescence Analyzer
Power Consumption Minimisation in Embedded Systems
Powerless Illumination
Power Line Networking
Power of Grid Computing
Power over Ethernet
Power System Contingencies
Power-supply ICs for slim LED-backlit TVs and PC main power systems
Precision IR thermometers
Printable RFID circuits
Printed Memory Technology
Printed organic Transistor
Project Oxygen
Proteomics Chips
Psychoacoustics
Push Technology
QoS in Cellular Networks Based on MPT
Quadrics network
Quantum Computers
Quantum cryptography
Quantum dot lasers
Quantum Dot Lasers
Quantum dots
Quantum Information Technology
Quantum Wires
QXGA – (Quad eXtended Graphics Array)
Radiation Hardened Chips (12)
Radio Astronomy
Radio Frequency Light Sources
Radio Network Controller
Real-Time Operating System (RTOS)-VxWorks
Real-Time Simulation Of Power Systems
Real-Time Speech Translation
Real Time System Interface
Real-Time Image Processing Applied To Traffic
Real-Time Obstacle Avoidance
Recent Advances in LED Technology
Remote Access Service
Remote Accessible Virtual Instrumentation Control Lab
Remote energy metering
Remote Monitoring And Thought Inference
Remotely Queried Embedded Microsensors
Residue theorem
Reversible Logic Circuits
RIFD: Radio Frequency Identification
Robot driven cars
Robotic balancing
Robotic Surgery
Role of Internet Technology in Future Mobile Data System
RPR: Resilient Packet Ring
RTOS – VxWorks(42)
Sampling theorems
Satellite Digital Radio(44)
Satellite Radio
Satellite Radio TV System
SCADA for power plant
SCADA system
Scalable Coherent Interconnect (SCI)
Screening for Toxic Nanoparticles
Search For Extraterrestrial Intelligence
Seasonal Influence on Safety of Substation Grounding
Secure Electronic Voting System Based on Image Steganography
Securing Underwater Wireless Communication Networks
Security In Embedded Systems
Self Healing Computers
Self Healing Spacecrafts
Self Phasing Antenna Array
Sensorless variable-speed controller for wind power generator(67)
Sensors on 3D Digitization
Sensotronic Brake Control
Serial Attached SCSI
Service Aware Intelligent GGSN
Short channel effects/ Latchup in CMOS
Signaling System
Significance of real-time transport Protocol in VOIP
Silicon on Plastic
Silicon Photonics
Silicon Technology
Silicon transistors
Silicon-carbide JFETs for high-end audio applications
Single Photon Emission Computed Tomography SPECT(59)
Slow Light For Optical Communications
Small Satellites
Smart Antenna
Smart Autoreeling mechanism
Smart Cameras in Embedded Systems
Smart Fabrics
Smart heat Technology in Soldering Stations
Smart Note Taker
Smart Pixel Arrays
Smart Quill
Smart rectifiers
Smartwire-DT communication system
SMF BAtteries
SMS based vehicle Ignition controlling system
SOFC, MCFC, Fuel cell performance models
Soft lithography
Software Radio
Software-Defined Radio
SOI Technology (Silicon On Insulation)
Solar Power Satellite
Solar-powered plane -Solar Impulse plane
Solid Electrolyte Dye-Sensitised Solar Cells
Solid-State Lighting
Solid-State RF Switches
Solid-state Viscosity
Souped-Up Mesh Networks
Sources of error in digital systems
Space Quantum Cryptology
Space Robotics
Space Shuttles and its Advancements
Speaking I-Pods
SPECT (Single-photon emission computed tomography)
Spectrum Pooling
Speech Compression – a novel method
Speech recognition: using dynamic time warping
Speed Detection of moving vehicle using speed cameras
Spin Valve Transistor
Spintronics
Spring-Loaded LVDT Position Sensors
STAP: Space-Time Adaptive Processing
Stealth Fighter
Stealth Radar
Steganography In Images
Stereoscopic Imaging
Storage Area Networks
Stream Processor
Super Capacitor
Superconductive Magnetic Energy Storage
Surface Mount Technology
Surface Plasmon Resonance
Surface-conduction Electron-emitter Display (SED)
Surge Protection In Modern Devices
Surround sound system
Swarm intelligence & traffic Safety
Synchronous Digital Hierarchy
Synchronous Optical Network
Synthetic Aperture Radar System
System on chip
Sziklai Pair (configuration of two bipolar transistors)
Tagged Command Queuing
Taylor’s and Laurent’ series
Tele-Graffiti
Tele-Medicine
Teleportation
Telestrator
Tempest and Echelon
Terahertz Transistor
Terahertz Waves And Applications
Terrestrial Trunked Radio
The Architecture of a Moletronics Computer
The Bionic Eye
The future of wireless network infrastructure
The InfraRed Traffic Logger
The making of quantum dots.
The mp3 standard.
The p-n junction
The speedes Qheap: a priority-queue data structure
The Synchronous optical network(SONET)
The Thought Translation Device (Ttd)
The TIGER SHARC Processor
The Ultra Battery
The Vanadium Redox Flow Battery System(35)
Theorems of integral calculus
Thermal Chips
Thermal infrared imaging technology
Thermography
Third Generation Solid State Drives
Three-dimensional integrated circuit.
Time Division Multiple Access
Time Reversal Terahertz imaging
Tiny Touch Screens
Token ring – IEEE 802.5
Tools and techniques for LTI control system analysis (root loci, Routh-Hurwitz criterion, Bode and
Nyquist plots)
Toroidal surface-mount power inductor for consumer electronics devices
Touch Screens
Tracking and positioning of mobiles in telecommunication
Transient Stability Assessment
Transistors and Moore’s law
Transparent Electronics
Transparent LCD displays
Treating Cardiac Disease With Catheter-Based Tissue Heating
Trends in appliance Motors
Trends in Mobiles & PC’s
Tri-Gate Transistor
Trisil – electronic component
TTL (Transistor–transistor logic)
Tunable lasers
Tunnel diode
Turbo codes
U3 Smart Technology
Ultra Conductors
Ultra-high frequency
Ultra Nano Crystalline Diamond
Ultra Small MCUs
Ultra Wide Band ( UWB)Sensors
Ultra-wideband technology
Ultra-Wideband
Ultrabright white SMD LEDs
Ultracapacitors
Ultrasonic Motor
Ultrasonic Trapping In Capillaries
Ultraviolet
Uniform linear array
Unijunction transistor
Unintentional radiator
Universal Asynchronous Receiver Transmitter
Unlicenced Moblie Access ( UMA) technology
USB Power Injector
User Identification Through Keystroke Biometrics
Utility Fog
UWB SENSORS: FOR EXCELLENT HOMELAND SECURITY
Vacuum Electronics For 21st Century(50)
Vacuum tube
Valence band
Vector field
Vehicle-to-Grid V2G
Vertical Cavity Surface Emission Lasers
VHSIC hardware description language
Vintage amateur radio
Virtual circuit
Virtual ground
Virtual Keyboards
Virtual Reality Visualisation
Virtual Retinal Display
Virtual retinal display (VRD) Technology
Virtual Router Redundancy Protocol (VRRP)
VIRTUAL SURGERY
Virtual worlds come to life
Visual Neuro Prosthetics
visual prosthetic
VLSI Computations
Voice morphing
Voice over internet protocol
Voice recognition based on artificial neural networks.
VT Architecture
VXI bus architecture
Wafer Level -Chip Size Packaging (WLCSP) Technology
Wardenclyffe Tower
Warner exemption
Wave impedance
Wave propagation
Waveguide antenna
Wavelength division multiplexing
Wavelength Division Multiplexing
Wavelet transforms
Wavelet Video Processing Technology
Wearable Biosensors
Wearable Technology innovations in Health care
Web-based home appliances controlling system
Web-based remote device monitoring
Web camera motion control
Welding Robots
Wheatstone bridge
Whip antenna
White facsimile transmission
White LED: The Future Lamp
WIDEBAND – OFDM
Wideband modem
Wideband Sigma Delta PLL Modulator
Williams tube
Wink pulsing
Wireless access point
Wireless Application Protocol
Wireless Charging Of Mobile Phones Using Microwaves
Wireless communication
Wireless community network
Wireless DSL
Wireless Fidelity
Wireless Integrated Network Sensors (WINS)
Wireless Intelligent Network
Wireless LAN Security
Wireless LED
Wireless Microserver
Wireless Mimo communication systems.
Wireless Networked Digital Devices
Wireless power transmission.
Wireless Video Service in CDMA Systems
Wisenet (Wireless Sensor Network)
Worldwide Interoperability for Microwave Access
XLR connector
Zener diode
Zero dBm transmission level point
Zero-dispersion wavelength
Zero-Energy Homes
ZIF (Zero insertion force)
Zigbee – zapping away wired worries(13)
Zigbee Networks(86)
Zipper noise elimination by the digital volume control
z-transform
This is all about Electronics engineering presentation topics for students, academicians and researchers.
Share with friends
Questions about FAFSA and CADAA?
Visit our Financial Aid and Scholarship Office for updated information, workshops and FAQs.
Earthquake Advisory
Campus closed until further notice
Furman, Burford J
Site navigation, me 106 lecture materials.
- Give to SJSU
- Introduction to ME 106 and Mechatronics [ppt]
- Syllabus [doc]
- Term project guidelines [doc]
- Review of basic electronics [ppt]
- Signal sources [ppt]
- RC filters [ppt]
- Notes on Lab 1 Intro to the Mechatronics Lab [ppt]
- LM35 data sheet [pdf]
- icrocontroller fundamentals [ppt]
- Pin map and schematic for the Arduino controller [pdf]
- Bit manipulations [doc]
- Addendum to bit manipulation handout [doc]
- C expressions [pdf]
- Programming microcontrollers [ppt]
- Embedded programming [ppt]
- Blocking vs. non-blocking code [pdf]
- Interfacing to control power [ppt]
- Rectification and simple power supplies [pdf]
- Transistor action [pdf]
- Diode and transistor summary [pdf]
- Pinball flipper example [pdf]
- 2N3904 NPN transistor data sheet [pdf]
- 2N2222 NPN transistor datasheet [pdf]
- TIP 120 NPN Darlington transistor datasheet [pdf]
- ULN2803 Octal Darlington Array datasheet [pdf]
- IRL520 N-type, logic-level, power MOSFET datasheet [pdf]
- IRF520 N-type, standard power MOSFET datasheet [pdf]
- SN754410 Quad half-H bridge driver datasheet [pdf]
- ctuators for mechatronics applications [ppt]
- RC servo fundamentals [pdf]
- Motor sizing procedure [pdf]
- Motor sizing example outline [pdf]
- Motor sizing example calculations [pdf]
- Motion control mechanics [pdf]
- Stepper motor fundamentals [pdf]
- Practical aspects of stepper motors [pdf]
- Operational amplifiers [pdf]
- INA126 instrumentation amplifier datasheet [pdf]
- Comparators [ppt]
- Digital-to-analog and analog-to-digital conversion [ppt]
- Ladder DAC and successive approximation ADC [pdf]
- ADC input range example [pdf]
- DAC and ADC Summary [pdf]
- Digital logic [ppt]
- Logic functions and Boolean algebra [pdf]
- Logic gate universality example [pdf]
- 7447 BCD to 7-segment display internals [pdf]
- 5 V TTL and CMOS logic [pdf]
- 555 timer [pdf]
- I2C and SPI [pptx]
- Course review [doc]
- Information for the final exam [ppt]
- Mechatronics: where to go from here? [doc]
SJSU Links and Resources
Information for.
- Current Students
- Faculty and Staff
- Future Students
- Researchers
- Engineering
- Graduate Studies
- Health and Human Sciences
- Humanities and the Arts
- Professional Education
- Social Sciences
Quick Links
- Budget Central
- Careers and Jobs
- Emergency Food & Housing
- Faculty & Staff
- Freedom of Speech
- King Library
- Land Acknowledgement
- Parenting Students
- Parking and Maps
- Annual Security Report [pdf]
- Contact Form
- Doing Business with SJSU
- File a Complaint
- Report a Title IX Complaint
San José State University One Washington Square, San José, CA 95192
408-924-1000
Engineers World
" Where engineers speak "
Solar Sails
Space Robotics
Micro-Electromechanical Systems
New Seminar Topics for Mechatronics Engineering Continue next page>>
Related seminars
Seminar Topics For Avionics
Seminar Topics For Mechanical Engineering
Seminar Topics For Electronics Engineering
Students Corner
- 1.Aeronautical Click for New Ideas >>
- 2.Aerospace Click for New Ideas >>
- 3.Agriculture Click for New Ideas >>
- 4.Aquaculture Click for New Ideas >>
- 5.Automobile Click for New Ideas >>
- 6.Applied Electronics & Instrumentation
- 7.Automation Click for New Ideas >>
- 8.Bio Chemical Click for New Ideas >>
- 9.Bio Medical Click for New Ideas >>
- 10.BioTechnology Click here >>
- 11.Ceramic Click for New Ideas >>
- 12.Chemical Click for New Ideas >>
- 13.Civil Click for New Ideas >>
- 14.Communication System
- 15.Computer Science
- 16.Computer Aided Design
- 17.Electrical Click for New Ideas >>
- 18.Electronics Click for New Ideas >>
- 19.Engineering Design
- 20.Environmental
- 21.Food Technology Click here >>
- 22.Genetics Click for New Ideas >>
- 23. Hacking Will be uploaded soon
- 24.Industrial Click here >>
- 25.Information Technology
- 26.Instrumentation & Control
- 27.Leather Technology
- 28.Marine Click here >>
- 29.Material Science Click here >>
- 30.Metallurgical Click here >>
- 31.Mechanical Click for New Ideas >>
- 32.Mechatronics Click for New Ideas >>
- 33.Mining Click for New Ideas >>
- 34.Naval Architecure Click here >>
- 35.Nanotechnology Click here >>
- 36.Ocean Click here >>
- 37.Oil & Paint Click here >>
- 38.Petroleum Click for New Ideas>>
- 39.Polymer Click for New Ideas >>
- 40.Polymer Electronics Click here >>
- 41.Printing Technology Click here >>
- 42.Production Click here >>
- 43.Pulp & Paper Technology
- 44.Railway Click here >>
- 45.Robotics Click here >>
- 46.Steel Click here >>
- 47.Sugar Technology Click here >>
- 48.Tele Communication Click here>>
- 49.Textile Click here >>
- 50.Transportation Click here >>
Copyright (c) 2021 engineers world All rights reserved. Powered by EW
Mechatronics
Note: This exam date is subjected to change based on seat availability. You can check final exam date on your hall ticket.
Page Visits
Course layout, books and references, instructor bio.

Prof. Pushparaj Mani Pathak
Course certificate.

DOWNLOAD APP
SWAYAM SUPPORT
Please choose the SWAYAM National Coordinator for support. * :

Mechatronics project topics for Engineering students

Mechatronics project topics : Mechatronics may be a multidisciplinary branch of engineering that has a mixture of engineering , electronics, telecommunications engineering, computer engineering, systems engineering and control engineering. As technology is progressing, the subbranches of engineering multiply and adapt. the target of mechatronics may be a design process that unifies these subbranches.
Actually, mechatronics just included the mixture of mechanics and electronics. therefore the word may be a combination of mechanics and electronics; however, as technical systems became more and more complex the definition has been broadened to incorporate more technical areas.
Many people treat “mechatronics” as a contemporary buzzword synonymous with robotics and “electromechanical engineering”.
Course Structure
Mechatronics students take courses in various fields:.
Mechanical engineering and materials science and engineering; Electronics engineering; Electrical engineering; Telecommunications; Computer engineering (software & hardware engineering); Computer science; Systems engineering; Control engineering; Optical engineering.
Applications
mechatronics project topics for students
Machine vision; Servo-mechanics; Automation and robotics; Sensing and control systems; automotive technology , automotive equipment within the design of subsystems like anti-lock braking systems; Computer-machine controls, like computer driven machines like CNC milling machines, CNC waterjets, and CNC plasma cutters; Expert systems; Industrial goods; Consumer products; Mechatronics systems; Medical mechatronics, medical imaging systems; Structural dynamic systems;
Transportation and vehicular systems; Mechatronics because the new language of the automobile; Computer aided and integrated manufacturing systems; Computer-aided design; Engineering and manufacturing systems; Packaging; Microcontrollers / PLCs.
Some related branches of mechatronics
Biomechatronics is an emerging branch of the mechatronics. the aim of biomechatronics is to integrate mechanical parts with a person’s being.This is usually wiped out the shape of removable gadgets like an exoskeleton. Biomechatronics is that the “real-life” version of cyberware.
diy Mechatronics Project
Furthermore there’s an another sort of the branch is Motion control for Advanced Mechatronics, which presently is recognized as a key technology in mechatronics. The strength of motion control are going to be represented as a function of stiffness and a basis for practical realization.
The control stiffness which might be variable consistent with the task reference sets the parameters of the motion sensing. The strength of the motion sensor is defined by the stiffness of the motion controller.
Avionics is additionally a sort of mechatronics because it combines several fields like electronics and telecommunication with Aerospace Engineering.
The Internet of things (IoT) is that the inter-networking of physical devices, embedded with electronics, software, sensors, actuators, and network connectivity which enable these objects to gather and exchange data. IoT and mechatronics are complementary.
Mechatronics Project Ideas
Pneumatic powered metal pick and place arm.

The aim of the project is to style and fabricate pneumatic arm for pick and place of cylindrical objects. The handling of materials and mechanisms to select and place of objects from lower plane to higher plane and are widely found in factories and industry manufacturing.
Electromagnetic Braking System

Electromagnetic braking is applying brakes using electronic and magnetic power. This uses the principle of electromagnetism to realize friction less braking. This increases the lifetime and reliability of brakes as there’s no friction results in less wearing out of brakes. Also it requires less maintenance and oiling. this is often an upcoming technological replacement for traditional braking systems.
Design & Fabrication of Attachable Wheelchair Automator :Mechatronics project topics

The wheelchairs are generally driven by manual efforts. The disabled drive wheelchairs by their hands while another person is required to push wheelchair of disabled . an easy attachable extension attaches to a wheelchair and may transform wheelchairs into E wheelchairs that require no manual efforts. mechatronics
Agricultural Robot

An agricultural robot may be a robot used for agricultural purposes. the most area of mechatronics application of robots in agriculture today is at the harvesting time. New applications of robots or drones in agriculture include planting seeds, harvesting, weed control, cloud seeding, environmental monitoring and soil analysis etc.
Hand Motion Controlled Robotic Arm : Mechatronics project topics

This system allows controlling a robotic arm by hand movements. this technique uses RF receiver having interface with the 8051 microcontroller which controls the driving force IC which is further liable for control of the arm movement.
Automated Coconut Scraping Machine

Coconut is widely utilized in food Industry within industrial food plants also as at homes. Scraping coconuts may be a very time consuming task. Manually doing so requires tons of efforts and isn’t so economical. So here we propose an automatic coconut scraping machine mechatronics project.
Automatic vacuum Robot Mechatronics project topics

A vaccum cleaner robotic system that permits for automatic cleaning of a specific area or room by covering the world using border analysis. The robot follows a zigzag path to hide entire room floor space. The system uses ultrasonic sensors for boundary sensing and operates accordingly so as to hide entire room.
Mini Windmill Power Generation Project

Renewable energy is on an increasing demand within the recent thanks to over stress on non-renewable resources and their increasing cost. Thus producing electricity with the utilization of natural resource like Wind energy
Six Legged Spider Bot using Klann Mechanism
Wheel robots are unable to travel through rough terrain. For this purpose we will use a legged robot. It can step over curbs , climb stairs or traveling places which wheels cannot do. The advantage of this mechanism is that, it doesn’t demand batch or microprocessor control of actuator mechanics.
Following is that the list of Mechatronics Project Topics:
- IOT Color Based Product Sorting Machine
- Wireless Humanoid Bionic Arm on Robotic Vehicle
- RF Controlled Beach Cleaner Robotic Vehicle
- Pneumatic Powered Wall Climbing Robot
- Remote Controlled Mini Forklift
- Rough Terrain Vehicle Using Rocker Bogie Mechanism
- Motorized Chain Mechanism Hacksaw
- Plant Irrigation Water Sprinkler Robot
- Coin Based Cola & Soda slot machine
- Design & Fabrication of Automated Punching Machine
- Design & Fabrication of Motorized Scissor Jack
- Rough Terrain Beetle Robot
- Steering Mechanism Vehicle With Joystick Control
- Automatic Seed Sowing Robot
- 2 Wheel Drive Forklift For Industry Warehouses
- Smart Solar Grass Cutter With Lawn Coverage
- Bedini Wheel Using Electromagnetic Flux Generation
- High Performance Hovercraft With Power Turning
- Automated 5Dof Robotic Arm Mechanism
- Automated Double Hacksaw Project
- Pedal Powered Water Purifier Project
- Automatic Blackboard / Whiteboard Cleaner System
- Automated Drain/Gutter Cleaner Project
- Automatic MotorBike Stand Slider
- Contactless Eddy Braking System
- E Skateboard With Motion Sensing
- Fully Automated Solar Grass Cutter Robot
- Remote Controlled Pick & Place Robotic Vehicle
- MC Based Line Follower Robot
- Mini conveyer belt Mechanism
- Dual Motor Electric Go-Kart For Rough Terrain
- Fire Fighter Robot Project
- Motorized 2 Wheel Scooter Project
- RF Controlled Robotic Vehicle
- RF Controlled Robotic Vehicle With Metal Detection Project
- Obstacle Avoider Robotic Vehicle
- Gearless Transmission Using Elbow Mechanism
- Pulley Based Movable Crane Robot
- Push Based Box Transport Mechanism
- Sand Filter & Separator Project
- Fire Fighter Robot With night-sight Camera
- Long Range Spy Robot With night-sight
- Spy Robot With Obstacle Detection
- Long Range Spy Robot With Metal Detection
- Remote Controlled Automobile Using Rf
- Remote Controlled Robotic Arm Using Rf
- Android Controlled Robotic Arm
- Hand Motion Controlled Robotic Vehicle
- Rf Controlled Spy Robot With night-sight Camera
- Hovercraft Controlled By Android
- Ideal Topics for Engineering Project’s (0)
- What Will SCOPE OF ELECTRONICS And Communication Engineering Be Like In The Next 50 Years? (0)
- Top Best Robotics projects for final year ece students (0)
- Top 40 Important PLC Projects for Engineering Students (0)
- List of Best Fascinating mini projects on electronics for engineering students. (0)
Leave a Reply Cancel reply
Your email address will not be published. Required fields are marked *
Save my name, email, and website in this browser for the next time I comment.
- Android Operating System
- What is Electrical power system ?
- What is an Induction Motor?
- Different Types of Insulators and Their Applications
- Wavelength of Light

Mechatronics Final Year Project
54 Comments
This was my Mechatronics Final Year Project at the Faculty of Mechanical Engineering in Skopje. It objective was to develop a device that will enable interaction of real arm movements with 3D computer models. I integrated three different fields in one device, t.e. mechanical, electrical and computer engineering:
- Solidworks to design the 3D model that represent the movements of the arm.
- Arduino Mega 2560 card for connecting the real world with the computer.
- MATLAB / Simulink to program the control of the 3D model
In the next video you can see a presentation of the project. This is its content:
- An Introduction. Here I briefly talk about the Mechatronics as a field of study which enabled me to develop this kind of a device.
- The Arduino Mega 2560. Some basic features of this Arduino Board which I used in this project.
- 3D Models in Simulink Environment. How to transfer 3D Model from Solidworks to Matlab / Simulink using the SimMechanics Link.
- Development of the device. Here I talko about the components that I used to build the device and how they work, as well as the Simulink Model, the program that is running on the Arduino Board and enables the interaction between the real world and the computer
- You can watch the following video or read the written tutorial below.
Building the device
Parts used in this project.
- Arduino Mega 2560
- 3-Axis Accelerometer
- Linear Potentiometer x5

The accelerometer is used for tracking the orientation of the arm. As the arm moves, the values from the X, Y and Z axis from the accelerometer change and are being read in the Analog Inputs of the Arduino Board. According to them the 3D Model moves as well.
The potentiometers are used for tracking the position of the fingers. I attached a spring (pen spring) to each of the potentiometer. The spring holds the potentiometer slider at a certain position and as the fingers move the slider is being pulled and the resistance of the potentiometer is change. That values are being read in the Analog Inputs of the Arduino Board and according to them the 3D Model’s fingers moves as well.
I used a plastic cover from a calculator as a base on which i attached the five potentiometrs. On top of them I put the Breadboard on which i secured the Arduino Board and the Accelerometer using a tape. On the picture below you can see the final appearance of the device.
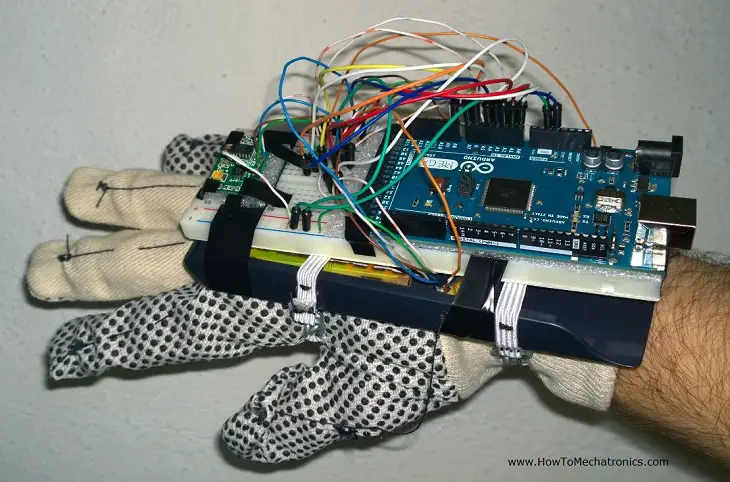
Circuit schematic of the device
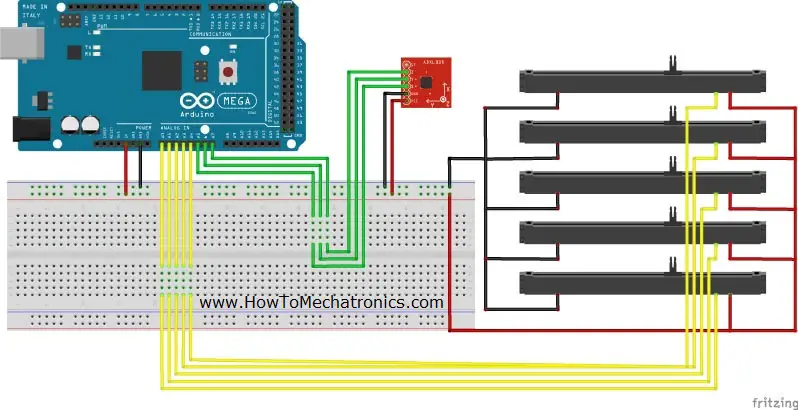
The 3D Model
The 3D Model is a representation of a human arm. First, I modeled it using Solidworks and then I transferred it into Matlab / Simulink using the SimMechanicsLink from Matworks.

The MATLAB / Simulink Model
Before building the Simulink model, first I had to install the Arduino IO Package which consists the Simulink library for communication with the Arduino board. Also using the Arduino IDE i had to upload the code to the Arduino board that comes with the package to enable the Simulink library. Here I would highly recommend my Tutorial for Matlab and Arduino IO Package so that you can understand the working principle and see the code.
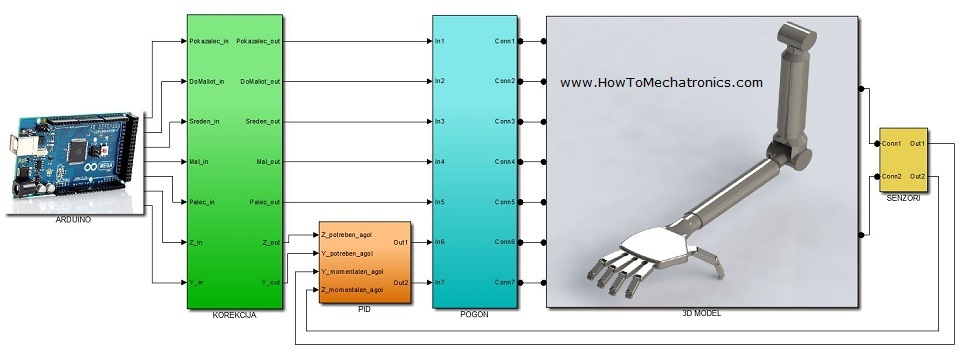
I organized my Simulink model into six subsystems:
- Arduino analog inputs blocks for the values from the accelerometer and the potentiometers
- Correction of the analog reads according to my needs
- PID control for getting smoother movements
- Joint Actuators blocks for driving the joints of the 3D model
- The 3D Model which was automatically generated using the SimMechanicsLink
- Joint sensor block for tracking the position the 3D model

You can Download the Simulink Model here:
Simulink Model - Mechatronics FYP
Check my Extension of this Project.
I reprogrammed the Arduino Glove to work as a Game Controller.

Automatic sorting machine – Mechatronics Student Project
Flower 3D Model
54 thoughts on “Mechatronics Final Year Project”
what kind of potentiometer you used? and how many kilohms?
I used 10k potentiometers, but it doesn’t really matter, you could any value for it.
Hello, Dejan nice project. what is the value of linear potentiometers?
I think it was 1K, but it doesn’t matter much, anything from 1K to 100k could do the job.
Excellent work! I want to make one too! Could you share more code and other details about this project with us?
Thanks. That’s all I have for this project.
I love this tutorial very much! I’d like to make one by myself. But I can not find the arduino code in this tutorial and how to use the SimMechanicsLink ? Could you help me out? Really appreciate!
The Arduino code comes with the Arduino IO Package and I have an example tutorial how to use the SimMechanicsLink here on the website. However, take a note at the version of your Matlab, because the latest versions don’t work with this Arduino IO Package, they have made a different one.
hi dejan that very good project i did not understand how you linked to 3d animation ,because i think i don’t the mat lab so can please put a link where i can learn this integration of all the three things.so we can make some different thing
Thanks. Well there are already few tutorials related to this Project on my website.
Hello , Dejan! What you’ve done is great! Congratulations! I got the idea to follow the rotary chassis , boom, arm and bucket of the excavator and always know how much have to dig. Much like your project. I’m curios how accurately can measure angles between components with combined accelerometer an gyro sensors. The rest is mathematics. Greetings for best tutorials that you have shown here ! Keep going!
Hi there, Well the gyro tends to drift and make errors. There are different filters that can reduce these errors but they could be complicated to be implemented. So, a project like that would work for sure, although the mathematics would be complicated and as for the accuracy I could say anything specific. Cheers!
great job, really it has helped me a lot.
Thanks, nice to hear that!
I am trying to build your system out of curiosity, with your help, the solidwork model now works, but, I am facing error when I run the simulink model in Matlab 2015. They show a algebraic loop error inside the PID controller. How did you get past this error? How can I do proper simulink rebuild? Awaiting your help. Thanks.
In the Simulink model you provided, how can I connect the imported xml model from the Solidworks file and the arduino hardware? I would be highly grateful if you help me out. Thanks
Check my other video tutorial for this one, Solidwroks and Matlab / Similink similation, you might find useful information.
Awesome bruh!! 🙂
WOW.You are perfet my friend,PERFECT! I realy like the way you do things,BRAVO!
just one question: can it work for the other 3d models like a MAYA or 3D MAX model? if the answer is yes, can you guid me about it?
Thanks! Well it can work if you can transfer the model into Matlab/ Simulink.
Great Work, very interesting. The 3D Arm model you have uploaded here shows rebuild errors in Solidworks 2016. Is it possible to upload the file again?
Thanks! Yea it gives those errors because it is a .step file. Nevertheless, now I uploaded the Solidworks files as well.
Thank you very much. You are truly awesome for being so helpful to people all around the world.
hai…great work you have there…I’m wahid from malaysia..I’m doing my final year project this year..I want to ask, is it possible make the GUI for 5 axis robotic arms using the way you create yours?if it is possible, can you teach me how to do the integration between all the software?
Well yes it is possible but I can’t see how I can help you. That project would require quite big and time consuming.
awesome project ^^ plz where can i find the code source of arduino thxx 😉
Thanks. Well the code is from Matworks Arduino IO Package. Check my Arduino and Matlab Tutorial, you should find more details about that in that post.
BROTHER YOU HELPS ME ALOT THANKS DUDE…
Can I translate it to Turkish to make it benefical for people who cant speak english.
Well all my projects and tutorials are my original work on which I have put enormous amount of time and effort. All the photos, videos and illustrations are copyrighted. Just translating them to your language would be the same as copying them which is not allowed. If you want to do that, you should rebuild (recreate) them on your own, with your own content (photos, videos, illustrations, text). Thanks for understanding!
First thing you are doing great projects. the second and most valuable thing is you are sharing this information with public. I really appreciate that..
Can you give me full instruction please…. Or give me some link that i can learn an do this project…. Thanks….
Good project bro… I just like to know what sensor you use in this project…? Can you give the code you use for this..? I like to make it… If you help me, the will be so kind… Thanks for your post….
I’m using the code from the Arduino IO Package from Matwork/ Matlab. Check my Arduino and Matlab Tutorial in order to see how it works.
What sensor you use for this…?
Amazing bro. you have done great work.I’m mechatronics engineer and i also want make this project ,can you please share the arduino code.
i am mechatronics engineer bro. and i want to make this project,please share the code of arduino….
The Arduino code is the code from IO Library Package from Matworks/ Matlab.
Ammazing bro.. can i use arduino atmega328p instead of Arduino Mega 2560?
Thanks! Yes of course you can use that one or any other as well.
Nyc bro.Its a fantastic project. U r a brilliant.i want to make this project as final year project.To what have u connected the pen spring ???
Thanks! Well they are connected on the sliders. One side is to the slider itself, and the other end to the one side of the housing of the slider.
Please how could we add a button to turn it ON and OFF.
BRO ,you are awesome ,you work hard and you give the information clear .simple
Hey Dejan, awesome work. I really liked your informative videos and I finally understand how I2C works, which I never able to grasp before 🙂 Thanks buddy. Keep up the new projects and informative videos about how things work. You really teach in simply way by putting up examples as well. Thumbs up 🙂
Thanks! I’m glad to hear this.
Awesome work bro……hats off..
Very good project mate, Are you on Facebook? I have some queries.
Thanks! You can find me on Facebook here: https://www.facebook.com/howtomechatronics
awesome project.keep it up ……………with more useful thoughts
Leave a Comment Cancel reply

Hey I'm Dejan, a maker, a techie and a mechatronics engineer. I love making electronics and robotics projects for you to learn and make something cool on your own.
Don't forget to check my 650K+ subs YouTube Channel .

Introduction to Mechatronics
Jan 27, 2014
2.51k likes | 5.56k Views
Introduction to Mechatronics . Jr-Lung (Eddie) Lin. Department of Mechanical and Automation Engineering, I-Shuo University. Introduction.
Share Presentation
- strictly specialized
- cad cam cae
- technological processes
- timer microcontroller mahdi hassanpour

Presentation Transcript
Introduction to Mechatronics Jr-Lung (Eddie) Lin Department of Mechanical and Automation Engineering, I-Shuo University
Introduction Mechatronicsis synergistic integration of mechanical engineering, electronics and intelligent computer control in design and manufacture of products and processes
What CAD/CAM/CAD • CAD: Computer-Aided Design • CAM: Computer-Aided Manufacturing • CAE: Computer-Aided Engineering
CAD/CAM/CAE software • CAD – 2D drafting • AutoCAD, TwinCAD, etc. • CAD – Solid modeling • Solid Edge, SolidWorks, Mechanical Desktop(MDT), etc. • CAM • SOLIDCAM, SURFCAM, MasterCAM, SmartCAM, etc. • CAE • ANSYS, ABAQUS, NASTRAN, ADAMS, MOLDFLOW, etc.
Microprocessor • CPU for Computers • No RAM, ROM, I/O on CPU chip itself • Example:Intel’s x86, Motorola’s 680x0 Many chips on mother’s board Data Bus CPU General-Purpose Micro-processor Serial COM Port I/O Port RAM ROM Timer Address Bus General-Purpose Microprocessor System Mahdi Hassanpour
Microcontroller • A smaller computer • On-chip RAM, ROM, I/O ports... • Example:Motorola’s 6811, Intel’s 8051, Zilog’s Z8 and PIC 16X CPU RAM ROM A single chip Serial COM Port I/O Port Timer Microcontroller Mahdi Hassanpour
Microprocessor vs. Microcontroller Microprocessor • CPU is stand-alone, RAM, ROM, I/O, timer are separate • designer can decide on the amount of ROM, RAM and I/O ports. • expansive • versatility • general-purpose • Microcontroller • CPU, RAM, ROM, I/O and timer are all on a single chip • fix amount of on-chip ROM, RAM, I/O ports • for applications in which cost, power and space are critical • single-purpose Mahdi Hassanpour
GPIB PC Board Serial/paralell CAN BUS PC-based Measurement and Control
Sensors and Actuators • Sensor A device that converts an environmental condition into an electrical signal. • Actuator A device that converts a control signal (usually electrical) into mechanical action (motion). (Taken together, sensors, actuators, controllers, and power supply form the basic elements of a control system.)
Actuators-Motors
The Following Special Formulation is Offered Mechatronics studies synergistic fusion of precise • mechatronical units, • electronic, • electro technical and computer components for the purpose of designing and manufacturing qualitatively new • modules, • systems, • machines and complexes of machines with intellectual control of their functional movements
Comments to the Definition • Mechatronics studies special conceptual approach to construction of machines. • The definition emphasizes synergetic character of components’ integration in mechatronic objects. • Integrated mechatronic components are always chosen at the designing stage. • Methods of parallel designing serve as methodological basis for Mechatronic Systems (MS) development. • The main objects that mechatronics studies are mechatronic modules. • MSare intended to perform a set movement. • In MS methods of advanced intelligent control are used to secure high quality in performing precise movements.
Principles of Construction MS Generalized Scheme of Machine with Computer Control of Movement The structure of a traditional machine e.g.: cutting forces for machining processes, contact forces and moments of forces at assembly, reactive force of the liquid jet at hydraulic cutting determ non-determ
Examples of Mechatronic Systems computer disk drive clothes washer
Computer Control Device Basic Functions • Control of mechanical movement process on-line with current sensor data analysis. • Arrangements to control MS functional movements. • Interaction with operator via human-machine interface off-line and on-line interaction at the moment of MS movement. • Data exchange between peripheral devices, sensors and other devices of the system.
The Core of Mechatronic Approach At the stage of designing one interface, as a separate device, is excluded out of a traditional structure, but physical essence of transformation carried out by this module is kept. It consists in integrating of components probably of different physical nature into a uniform functional module. in other words
Basic Advantages in Comparison with Traditional Means of Automation • rather low cost; • ability to perform complicated and precise movements (of high quality); • high reliability, durability and noise immunity; • constructive compactness of modules; • improved overall dimension and dynamic characteristics of machines; • opportunity to rebuild functional modules to sophisticated systems and complexes.
Modern Trends of MS Development • Office equipment; • Computer facilities; • Photo and video equipment; • Machine-tool construction and equipment for automation of technological processes; • Robotics;
Modern Trends of MS Development • Aviation, space and military techniques; • Motor car constructor;
Modern Trends of MS Development • Micro machines; • Control and measuring devices and machines; • Simulators for training of pilots and operators; • Show-industry; • Non-conventional vehicles.
Requirements of the World Market in the Considered Area • Standard ISO 9000; • Necessity for active introduction of forms and methods of international engineering and putting new technologies into practice; • Increasing role of small and average industrial enterprises in economy owing to their ability to quick and flexible reaction to changing requirements of the market; • Intellectualization of mechanical movement control systems and technological functions of modern machines.
Fundamental Problems • Structural integration of mechanical, electronic and information departments into a uniform creative staff; • Education and training of engineers specialized in mechatronics and managers able to organize integration and supervise work of strictly specialized experts with different qualifications; • Integration of information technologies from various scientific and technical fields into a uniform toolkit to provide computer support of mechatronic problems; • Standardization and unification of all used elements and processes at designing and manufacturing MS.
Levels of Mechatronic Systems’Integration The First Level • conveyors, • rotary tables, • auxiliary manipulators
Levels of Mechatronic Systems’Integration The Second Level • operated power machines (turbines and generators), • machine tools and industrial robots with numerical program management
Levels of Mechatronic Systems’Integration The ThirdLevel Synthesis of new precise, information and measuring high technologies gives a basis for designing and producing intellectual mechatronic modules and systems.
Career Paths in Mechatronics • mechatronics is seen as a prime career path for mechanical engineers of the future; • mechanical engineers with a mechatronics background will have a better chance of becoming managers; • classically trained mechanical engineers will run the risk of being left out of the interesting work.
NASA Mars Rover DLR Gripper Asimo Humanoid Indoor Robots Robot Base Station KUKA Manipulator Outdoor Robots Robot Platforms (1)
Robocup Team Qurio Humanoid Aibo 4 legged Robot Robot Platforms (2)
Robot Platforms (3) Robot educational kits Robot sensors
Thank You For Your Attention!
- More by User

From Neuroscience to Mechatronics
Presentation by Fabian Diewald JASS April 2006. From Neuroscience to Mechatronics. Outline. The human brain The vestibulo-ocular reflex (VOR) The VOR – technical applications Camera stabilizing system at TU Munich A possible algorithm Testing the camera stabilizing system
731 views • 44 slides

CMPE 118/L Introduction to Mechatronics
CMPE 118/L Introduction to Mechatronics. Tu-Th 4:00-5:45pm, Jack Baskin Engineering 372. Lab: Jack Baskin Engineering 150, 24/7. Instructor: Prof. Gabriel Hugh Elkaim. TAs: Rob Kelbley, Eric Decker. Why “Smart Products?”. Focuses on Microcomputers as Components, not Controllers
597 views • 34 slides

Mechatronics
Mechatronics. Instructor: Shuvra Das Mechanical Engineering Dept. University of Detroit Mercy. Mecha____what?.
2.04k views • 35 slides

Control-II: from Digital Control to Mechatronics to Smart Mechatronics
Control-II: from Digital Control to Mechatronics to Smart Mechatronics. YangQuan Chen (1) and Wenbin Yu (2) (1) Center for Self-Organizing and Intelligent Systems (CSOIS), Dept. of Electrical and Computer Engineering, Utah State University
490 views • 22 slides

MECHATRONICS
Slovak University of Technology Faculty of Material Science and Technology in Trnava. MECHATRONICS. Lecture 01. MECHATRONICS. M ECHATRONICS is a natural stage in the evolutionary process of modern engineering design.
936 views • 15 slides

MECHATRONICS. Delivering industry relevant mechatronics training and education for high tech business sectors. AACC April 2014 . Our Team. Marilyn Barger , Ph.D., P.E., CPT Executive Director and PI Florida Advanced Technological Education Center of Excellence www.fl-ate.org.
593 views • 20 slides

Mechatronics. Mechatronics. Bob Parker – Instructor – Industrial Technology Ivy Tech Community College Fort Wayne, IN 3800 N. Anthony Blvd. 14 Regions Statewide School of Technology Advanced Manufacturing Industrial Technology. Mechatronics.
411 views • 15 slides

ME 6405 INTRODUCTION TO MECHATRONICS :
ME 6405 INTRODUCTION TO MECHATRONICS :. OPERATIONAL AMPLIFICATORS. Dr. Ume ME 6405 Introduction to mechatronics. Contents. Introduction Theory A. Definition and presentation B. Linear Mode C. Non Linear Mode Real Operational Amplificators Uses Conclusion References.
776 views • 50 slides

MECHATRONICS. Delivering industry relevant mechatronics training and education for high tech business sectors. AACC April 2014. Our Team. Marilyn Barger , Ph.D., P.E., CPT Executive Director and PI Florida Advanced Technological Education Center of Excellence www.fl-ate.org.
407 views • 20 slides

Slovak University of Technology Faculty of Material Science and Technology in Trnava. MECHATRONICS. Lecture 11. MECHATRONICS IN TECHNOLOGY EQUIPMENTS AND SYSTEMS.
572 views • 24 slides

Slovak University of Technology Faculty of Material Science and Technology in Trnava. MECHATRONICS. Lecture 08. VIBRATION OF THE SYSTEMS WITH MORE DOF. Oscillation of the model systems with more degrees of freedom is described by the matrix equation.
351 views • 10 slides

Slovak University of Technology Faculty of Material Science and Technology in Trnava. MECHATRONICS. Lecture 10. STATIC & DYNAMIC CHARACTERISTICS OF DRIVES AND LOADS.
375 views • 17 slides

Mechatronics. The Foundation for Manufacturing, Supply Chain Technology and other critical industries. October 24, 2013. Our Participants. Gary Forger SVP of Professional Development. William Mazurek, Director of Continuous Improvement. Marilyn Barger, Ph.D., P.E., CPT
759 views • 17 slides

Slovak University of Technology Faculty of Material Science and Technology in Trnava. MECHATRONICS. Lecture 04. MODEL ANALYSIS. The model analysis generally serves for determination of properties for a prescribed system.
507 views • 24 slides

Intro to Mechatronics
Intro to Mechatronics. Mechanics. mecha. Mechatronics. Eletronics. tronics. Mechatronics Defined — I. “The name [mechatronics] was coined by Ko Kikuchi, now president of Yasakawa Electric Co., Chiyoda-Ku, Tokyo.” R. Comerford, “Mecha … what?” IEEE Spectrum , 31(8), 46-49, 1994.
696 views • 33 slides

Introduction to Mechatronics and Mechatronics in Real Life
Introduction to Mechatronics and Mechatronics in Real Life. Mariya Popovchenko 3 April 2006. JASS 2006, St. Petersburg. Introduction.
644 views • 22 slides

An Introduction to Real-time Machine Vision in Mechatronics
An Introduction to Real-time Machine Vision in Mechatronics. Dr. Onur TOKER. Outline. RT Machine Vision ? Mechatronics ? Review of previous experiments Image sensors (CMOS versus CCD) CMUCam, and cwCAM Interfacing a CCD camera to an 8-bit uC Difficulties in real-time machine vision
603 views • 33 slides

INTRODUCTION TO MECHATRONICS :
INTRODUCTION TO MECHATRONICS :. OPERATIONAL AMPLIFICATORS. Introduction to mechatronics. Contents. Introduction Theory A. Definition and presentation B. Linear Mode C. Non Linear Mode Real Operational Amplificators Uses Conclusion References. Definition and presentation.
770 views • 50 slides

446 views • 44 slides

337 views • 22 slides

Introduction to Mechatronics and Measurement Systems
SMJP 3333 ( Mechatronics). Introduction to Mechatronics and Measurement Systems. by Dr.Aung Lwin Moe REF: Prof. I. Charles Ume. Mechatronics. The synergistic combination of mechanical, electrical, and computer engineering Emphasis on integrated design for products
1.38k views • 74 slides
- Mechanical Engineering
- NOC:Mechatronics (Video)
- Co-ordinated by : IIT Roorkee
- Available from : 2020-11-18
- Intro Video
- Introduction
- Mechatronics System Examples
- Electric Circuits and Components
- Semiconductor Electronics
- pplication of Transistors
- Sensors Performance Terminology
- Displacement, Position & Proximity Sensors - I
- Displacement, Position & Proximity Sensors - II
- Force, Fluid Flow Sensors
- Acceleration & Vibration Measurement Sensors
- Mechanical Actuation Systems
- Hydraulic and Pneumatic Actuators
- Electrical Actuation System - I
- Electrical Actuation Systems - II
- Data Presentation Systems
- Introduction to Signal Conditioning & Op-Amp
- OP-AMP As Signal Conditioner
- Analogue To Digital Converters
- Digital To Analogue Converters
- Artificial Intelligence
- Digital Circuits - I
- Digital Circuits - II
- Microprocessor
- Microcontroller
- Microcontroller Programming Example
- Mechanical System Model
- Electrical System Model
- Fluid System Model
- Dynamic Response of Systems
- Transfer Function and Frequency Response
- Controllers
- Digital Controllers
- Program Logic Controllers
- Input, output and Communication systems
- Fault Finding
- Project using Microcontroller â ATMEGA16
- Myoelectrically Controlled Robotic Arm
- ABU Robocon 2019 â Part 1
- ABU Robocon 2019 â Part II
- Design of a Legged Robot
- Watch on YouTube
- Assignments
- Transcripts
- E & C ENGG
- JAVA PROGRAMS
- PHP PROGRAMS
- ARTIFICIAL INTELLIGENCE
- CLOUD COMPUTING
- WIRELESS TECHNOLOGY
Presentation Topics for Mechanical Engineering
- by Ravi Bandakkanavar
- June 22, 2017
This post lists latest presentation topics for Mechanical engineering. These topics have been picked from wide areas of Mechanical Engineering like Robotics, Automobiles, Nano Technology etc.
- Adaptive Crusie Control Plus System
- Ablative Materials
- Abrasive Blast Cleaning
- Active Electrically Controlled Suspension
- Active roll-over protection system in Automobiles
- Adaptive control
- Advanced Battery and Fuel Cell Development for Electric Vehicle
- Advanced composites
- Advanced Cooling Systems
- Advanced Propulsion Methods
- Advanced Quadruped Robot – BigDog
- Advanced Rocket Motors
- Advances in Capillary Fluid Modelling
- AeroCapture
- Aerodonetics
- Aerospace Flywheel Development
- Air Augmented Rocket
- Air Casters
- Air Cushion Vehicles
- Air Powered Cars
- Air suspension system
- Scramjet Engine
- All Aluminium Alloy Conductors (AAAC)
- ArcJet Rocket
- Autocollimator
- Automatic Conveyor for Industrial Automation
- Automated Guided Vehicle System
- Adaptive control for 3-D overhead crane systems
- Electronic Fuel Injection (EFI)
- Magnetic Levitation Train
- Autonomous Submarines
- Ball Piston machines
- Bench top wind tunnels
- Bio-degradable polymers
- Biomass Fuelled Power Plant
- Twin-Turbo or Biturbo
- Blended Winged Aircraft
- Camless engine with electromechanical valve actuator
- Carbon Foam-Military Applications
- Cryogenic Treatment of Brake Rotors
- Car Speed Control by Blue Tooth
- Carbon nanotube cloths
- Carbon Nanotubes
- Collision warning system
- Compressed Air Cars
- Common Rail Direct Injection (CRDI) Engines
- Composite materials
- Compound Vortex Controlled Combustion
- Continuously Variable Transmission
- Conditional monitoring & fault Diagnosis
- Contactless energy transfer system
Suggested Read: Technical paper presentation topics for CSE Presentation Topics for Civil Engineering
- Corrosion resistant gear box
- Crew Exploration Vehicles
- Cruise Missile Technology
- Cryogenic Grinding
- Cushioning Impact in Pneumatic Cylinder
- Dark Room machining
- Digital manufacturing
- Double-wishbone suspension
- Advantages of tubeless tires
- Drive-By-Wire Systems
- Driver information system (DIS)
- Dual Clutch Transmission
- Dynamic Ride Control (DRC)
- Dynamic shift program (DSP)
- Eco-Friendly Surface Treatments
- Bomb Detection Robotics using Embedded Controller
- Traffic Light Control System
- Adaptive Cruise Control System
- Maglev Levitation Trains
- Vapor Absorption Cooling System
- Combustion Stability in I.C. Engines
- Electromagnetic Brakes
- Electric Power Assisted Steering
- Electromagnetic Valves
- Electrochemical Machining (ECM) & EBM
- Electromagnetic Bomb
- Electron beam machining
- Electronic Road Pricing System
- Energy Conversion and Management
- Energy efficient turbo systems
- Engineering Applications of Nylon 66
- F1 Track Design And Safety
- Full Authority Digital Engine Control
- Floating Power Stations
- Floating Solar Power Station
- Fluid Energy Milling
- Fly ash utilization
- Flywheel Batteries
- FMS (Flexible Manufacturing Systems)
- Fractal Robot
- Free Form Modelling Based on N-Sided Surfaces
- Frictionless Compressor Technology
- Fuel Cell Airplane
- Fuel cell powered Go-Karts
- Fuel Cells on Aerospace
- Fuel Energizer
- Fuels from Plastic Wastes
- Low-cost anti-lock braking and traction control
- Arial Photography Using Remote Flying Robot
- Electronic Vehicle Identification in the Intelligent City
- Hexapod Robots
- Robotic Surgery
- Hydrogen (water) Powered vehicle
- Carbon fiber reinforced plastic Composites
- Dynamic Car Parking Negotiation and Guidance Using an Agent-Based Platform
- Full Colour 3D Modelling Using Rapid Prototyping
- Functional Nanocrystalline Ceramics
- Fuzzy logic in Aircraft stability
- Geo-Thermal Energy
- Handheld Radiation detector
- HANS-In F1 Racing
- Harvesting Wave power
- Heavy duty Gasoline engines
- Difference between tubeless and with tube tires
- High Altitude Aeronautical Platforms
- High angle of attack aerodynamics
- High-Speed Precise Gear Boxes
- High-Speed Trains
- Highly Productive And Reconfigurable Manufacturing SystemHigh-Wire car
- Hovercrafts
- Tanker Robot For Vision Based Surveillance System
- Sensor Based Motion Control Of Mobile Car Robot
- Involuntary Train Collision Prevention System
- Hybrid Energy Systems
- Hybrid Motorcycles Hybrid Synergy Drive (HSD)
- Hydraulic railway recovery systems
- Hydrogen Car
- Hydrogen Generation via Wind Power Electrolysis
- Hy-Wire Car
- Infrared Curing And Convection Curing
- Infrared Thermography
- Intelligent Compact drives
- Inter-Continental Ballistic Missile (ICBM)
- Jelly Filled Telephone Cables
- Jet Powered Boat
- Jet Stream windmill
- Jetex Engine
- Kalina cycle
- Load Sensing Hydraulics
- Latest in hi-tech petrol fuel injection GDI (Gasoline Direct Injection)
- Latest Trends in Automotive Engg.& Technology
- Launching Space Vehicles from Moon
- Lean Burn Spark Ignition Engine
- Lean engineering
- Lightweight material-Carbon fiber
- Liquid Injection Thrust Vectoring (LITV)
- Logistics and supply chain management
- Low-Cost Spacecraft Simulator
- Magnetic Levitation
- Magnetic Nanocomposites
- Magnetic Refrigeration
- Marine electric propulsion
- Mass Rapid Transit system (MRTS)Mechanical torque limiters
- MEMS in Industrial Automation
- Mesotechnology
- Metal-Matrix Composite ProcessingMicro Batteries
- Micro Fluidic Chips
- Micro Gravity
- Micro Heat Exchangers
- Micro hydraulics
- MicroTopography
- Miller Cycle Gas Engine
- Modeling and simulation
- Modular conveyor belts
- Modular Gear motor
- Molten oxide electrolysis
- Multi Valve Engine
- Nano Fluids Thermal Applications
- Magneto Abrasive Flow Machining
- Multi Point Fuel Injection System
- Six Stroke Engine
- Nanobatteries
- Cell Phone Operated Robot
- Low-Cost Wind Power Plant
- Vacuum Brakes
- Vehicle Speed Sensing and Smoke Detecting System
- Fire Fighting Robot
- Nanomaterial-based Catalyst
- Nanorobotics
- Nono Fluidics
- Nuclear fuel reprocessing
- Nuclear Power Potential as Major Energy Source
- Ocean Thermal Energy
- Oil Shear Technology
- Oil well drilling
- Opto-Electronic Sensor System
- Orbit Forming
- Orbital WeldingOrbital/Space Mechanics
- Pendolino system for railway passenger comfort
- Perpetual Motion Machines
- Photonic Crystals
- Pint Sized Power Plants
- Plasma arc welding
- Plastic WeldingPolymers castings
- Porous Burner Technology
- Portable X-Ray Fluorescence Analyser
- Power from Space for use on EarthProcess Automation Techniques
- Pseudoelasticity and Shape Memory in Metal Nanowires
- Pulse Detonation Engine
- Pulsed Plasma Thruster
- Pump Noise level reduction methods
- Quantum Chromo Dynamics
- Random vibrations
- Rapid Injection Moulding
- Recent Trends in Quality Management
- Regenerative Fuel Cells
- Resistojet Rocket
- Responsive manufacturing
- Robot-driven cars ( Autonomous car )
- Robotic Assistants for Aircraft Inspectors
- Humanoid Robots
- Robots in Radioactive Environments
- Selective Catalytic Reduction (SCR)
- Self Healing Spacecraft
- Self-Healing Polymer Technology
- Semi-synthetic cutting fluids
- Sensotronic Braking System
- Single Crystal Turbine Aerofoil
- Solar Impulse – Solar Powered Flight
- Solar Powered Refrigerator
- Solid Liquid Separation Technology
- Space Elevator
- Space Robotics
- Space Shuttle
- Space Shuttle Boosters
- Space Station
- Spacecraft Propulsion
- Special materials for high-temperature applications
- Stealth Radar
- Synthetic polymers
- Stealth Technology
- Steer-By-Wire
- Stereoscopic Projection Systems
- Stirling engine
- Super Flat Nano Films
- Supercavitation
- Superconducting Rotating Machines
- Synthetic Aperture Radar
- Tension Control Brake
- Thermo Acoustic Refrigeration
- Thermoacoustic refrigerator
- Threadless Couplings
- Tire & wheel without pneumatics
- Tool Management System
- Touch trigger probes
- Trends in welding
- Turbines in silicon
- Ultra Nano Crystalline Diamond
- Underwater Welding
- Underwater windmill
- Vacuum Braking System
- Valvetronic Engine Technology
- Variable compression ratio engine
- Variable Length Intake Manifold (VLIM)
- Variable Valve Timing in Internal Combustion Engines
- Vertical Landing and takeoff engine
- Weld flaw detectors
- Welding Robots
- Wind-diesel System
- Click to share on Twitter (Opens in new window)
- Click to share on Facebook (Opens in new window)
- Click to share on LinkedIn (Opens in new window)
- Click to share on Pinterest (Opens in new window)
- Click to share on Pocket (Opens in new window)
67 thoughts on “Presentation Topics for Mechanical Engineering”

Hello sir, I am Radhika Tiwari. I am doing diploma in mechanical engineering. I need a topic for my final year project model. Can you please provide me some trending topics to work on
Hello sir .. I am mahaveer Singh from mechanical engineering (b.tech) final year student .. I want a topic for a term paper presentation in my clg . Which I use in future for my project also… Suggest me topic plzz….
You can talk about flying taxi (air taxi). There is also Robot Dog.
Comments are closed.
- Browse Works
- Engineering
- Mechatronics Engineering
Mechatronics Engineering Research Papers/Topics
A programmable tool-kit for a smart weather system using predictive analytics at the botswana international university of science and technology.
Abstract: This work presents a programmable toolkit that allows the design and implementation of a smart weather system(SWS) at a local level. The uPyCraft software development kit (SDK) was used to load the MicroPython code and scrap three weather values (surface temperature, relative humidity and atmospheric pressure) from the DHT11 and BME280 sensors connected to the ESP8266 microcontroller. The NetBeans SDK was used to develop the database management system using SQLite and Java programi...
Design and Construction of a Vehicle Tracking and Accident Alert System Using GPS and GSM Module
This project is about the Design and Construction of a Vehicle Tracking and Accident Alert System (VTAA) using GPS and GSM Technology. It comprises of integration between GPS receiver, microcontroller and GSM module, and of course the push button for accident alert activation. The combination of all this technology will produce our VTAA system. The GPS module receive the coordinate of the point at which the system is located, controlled by the user using command interfaces through...
Design of Automatic Plant Irrigation System Using Microcontroller
ABSTRACT Automatic plant irrigation system rise as a good choice and alternative to traditional irrigation methods since it is saving time and effort that are consumed by traditional methods where people are compelled to stop doing their important activities. The aim of this thesis is to develop a microcontroller-based automatic irrigation system. This system will run automatically by referring to the level of soil moisture. The humidity sensor type connected to the microcontroller is soil m...
Simulation of 3D Car Painting Robotic Arm
ABSTRACT Robotic is an electromechanical system, help improve production accuracy, and reduces time and increase production. In this project a study of 3D robotic ARM design, simulation concepts and theories for the painting of cars that deals with the design, construction, operation, and application of robots is conducted. The simulation covers different parameters to evaluate the design. Moreover simulation environment help to test these parameters cost effectiveness of building robots and ...
Cascaded PID Control System for UAV with Gain Factor Prediction Using ML
Drones are not inherently stable, necessitating the use of a flight controller. If the UAV is properly tuned, the drone will fly steadily; otherwise, it won't. Hence, we have used a PID (proportional, integral, differential) controller for a stable flight. A well-functioning PID controller should enable amazing climbs and long-range flights. But, when used singly, PID controllers can provide poor performance, resulting in a long settling time, overshoot, and oscillation. Here, we propose a ne...
Design Of The Heat Exchanger Using MATLAB Programme (Case Study Khartoum Refinery Company Ltd)
ABSTRACT A heat exchanger is a medium that transfers heat energy from a high temperature fluid to another low-temperature fluid without mixing the fluid together. Thermal exchange is one of the most important applications in many fields, such as food processing engineering, especially in the manufacture of materials that are highly sensitive to high temperatures, as well as difficult to heat or raise their temperature by direct methods and other materials. Heat exchangers are used in many en...
Invitro Evaluation Of Neem Tree Seed Oil Against Fungal Growth Of Fusarium Oxysporum. F. Sp. Lycopersici, The Causal Agent Of Tomato Wilt Disease.
Abstract Fusarium wilt considered as one of the most important diseases of tomato in Sudan. The present investigation was undertaken under laboratory conditions to study the effect of different neem oil concentrations, and synthetic fungicide,(AmistarTop 200ml/100L Water), on growth of the fungus Fusariumoxysporumf. sp. Lycopersicithe causal agent of wilt disease on tomato. Three concentrations of neem oil (1.5, 2.5 and 3.5 %) and fungicide as recommended dose were tested in addition to cont...
Design And Implementation Of Vehicles Accident Notification System
Abstract Ever since the invention of cars accident was introduced as a major cause of death and car manufactures has been developing new ways to prevent death by accident. Time is very important factor when it comes to saving a person’s life, any delay in detecting an accident or failing to locate its position life. The solution proposed by this thesis is to use a combination of collision detection unit and identify an accident and report it to the appropriate authorities and clear the roa...
Automating Aircraft Painting Hanger By Using PLC Conceptual Design
ABSTRACT Aircraft Painting process recovers from many problem associated with the entire painting activities , such like efficiency , cost , environmental factors, and risks to the painting labors (contaminations , fumes ,flammability , toxicity ) . This research is to provide conceptual design and implement optimum solution to the problems mentioned above by using the automation techniques (PLC tool) to devolve a first phase painting robot .Considering the use of sensors ( object sensors ,...
Speed Control Of DC Motor Using Proportional–Integral–Derivative Controller And Fuzzy Logic
Abstract Fuzzy control systems have been successfully applied to a wide variety of practical problems. It has been shown that these controllers may perform better than conventional controllers, especially when applied to processes difficult to model, with nonlinearities. On the other hand, the direct current (DC) motor has been widely used as well because it is one of the most common actuators used in control systems. The main objective of this research is to control the speed of DC motor us...
Use of SCADA system for remote monitoring of Khartoum state water corporation
ABSTRACT The Supervisory Control and Data Acquisition (SCADA) system monitors and controls many applications such as: (Water distribution network including water reticulation,pump stations ,Public utilities, including electrical power generation, oil and gas pipelines, and water and sewage treatment plants). The SCADA system provide reliable and efficient water supply services across (enabling us to monitor and control the entire network from one location, saving time and resources and Minim...
Designing and implementation of PID controller robotic arm
Abstract Designing and controlling a robotic arm with great performance is one of the fields of interest in many applications. This thesis is concerned with the problems control of robot arm (mentor) using Proportional Integral Derivative (PID) controller for axis1 (shoulder) and axis2 (elbow). The research work was undertaken in the following developmental stages; first stage, estimation of the transfer functions of Direct current (DC) motors actuators of tow axis’s using system identific...
Simulation Of Microcontroller Based Industrial Robotic Arm Controller
ABSTRACT Robots are used for the most boring and repetitive jobs in manufacturing. The military and police use robots for dangerous jobs, such as manipulating explosive devices. In this project of simulation of industrial robotic arm to pick and place like in cement factory at rotary packing machine, The conventional packing system is working manually by hand which need more labors to accomplish the packing process and also require a great effort from these labors which will lead to incr...
Designing And Building A Model For Visual Servoing Robotic Arm
ABSTRACT Visual Servoing has been a focus of intensive research form the last three decades due to its various robotic applications, mainly to allow performing autonomous tasks with the help of image sensors. This thesis presenting a visual servoing control system for a 3DOF robotic arm which is visual approach of servo using a vision sensor as a feedback, this approach introduce a better flexibility more than usual used passive sensors allow the robot arm to track the object without dependi...
Design And Fabrication Of A Microcontroller Based Liquefied Petroleum Gas Leakage Detection With Gsm Alert Monitoring System
ABSTRACT Liquefied Petroleum Gas (LPG) is a group of flammable hydrocarbon gases that are liquefied through pressurization and commonly used as fuel. This project aims to design and implement a micro-controller based Liquefied Petroleum Gas (LPG) gas monitoring & leakage detection system with GSM alert system. Design and implementation of gas detection system as well as SMS alert systems were done to achieve the project aim. Gas leaks can cause major incidents resulting in both human injurie...
Popular Papers/Topics
Design of voice based smart wheelchair system, development of autonomous lawn mower from locally sourced materials, design of a distribution transformer monitoring system using global system mobile technology, design and implementation of an aircraft gas turbine engine test system, design and implementation of an automated guided vehicle model in production line control system using wi-fi.
Privacy Policy | Refund Policy | Terms | Copyright | © 2024, Afribary Limited. All rights reserved.
IMAGES
VIDEO
COMMENTS
This course is an introduction to designing mechatronic systems, which require integration of the mechanical and electrical engineering disciplines within a unified framework. There are significant laboratory-based design experiences. Topics covered in the course include: Low-level interfacing of software with hardware; use of high-level graphical programming tools to implement real-time ...
For aspiring mechatronics engineering students, brainstorming project ideas to work on can be an exciting yet challenging task. To provide some inspiration, here is a curated list of intriguing project ideas: Autonomous Drone Delivery System: Design and develop a drone delivery system capable of autonomously navigating through obstacles and ...
Mechatronics: Working Definition for us. Mechatronics is the synergistic integration of sensors, actuators, signal conditioning, power electronics, decision and control algorithms, and computer hardware and software to manage complexity, uncertainty, and communication in engineered systems. Product Realization Paradigm.
ECE5320 - Mechatronics Assignment 1: Literature Survey on Sensors and Actuators Topic: DC Motors (Actuators) - It can be a brushed DC motor, a brushless DC motor, etc. Based on the type of application, DC motors range from as low as $5 to as high as over $4000 per unit.
Alphabetical List of topics. Artificial Intelligence in Mechanical Engineering. Atomistic Characterization of Dislocation Nucleation and Fracture. Automated Highways. 3D Solar cells. Acoustic parking system (APS) Driverless Cars. Active Electrically Controlled Suspension.
Links to databases for mechatronics, and interdisciplinary field that combines mechanical, computer, electrical, and systems engineering. Also helpful for robotics, control systems, intelligent control, and related topics.
Topic Description Date 1 Introduction and C Programming This week, students get an overview to robotics and the lecture. We will discuss the basics of programming in C. 24.02.2020 2 Sensors This lecture starts with an overview of sensor types and applications. Topics will include: digital sensors, analog sensors, and sensor specifications.
Description. This course is an introduction to designing mechatronic systems, which require integration of the mechanical and electrical engineering disciplines within a unified framework. There are significant laboratory-based design experiences. Topics covered in the course include: Low-level interfacing of software with hardware; use of high ...
A primary purpose of the IEEE/ASME Transactions on Mechatronics is to have an archival publication which encompasses both theory and practice. Papers published in the IEEE/ASME Transactions on Mechatronics disclose significant new knowledge needed to implement intelligent mechatronics systems, from analysis and design through simulation and ...
Mechatronics. Simplest definition of Mechatronics is the combination of mechanisms or mechanical motions with electronics. A mixture of mechanical engineering and electronics engineering to achieve more complex operations in robotics and automation.
Mechatronics is a multidisciplinary field that refers to the skill sets needed in the contemporary, advanced automated manufacturing industry. At the intersection of mechanics, electronics, and computing, mechatronics specialists create simpler, smarter systems. Mechatronics is an essential foundation for the expected growth in automation and manufacturing.
More Electronics Engg. Topics (Alphabetical List) Here is the list of thousands of presentation ideas for presentations for electronics and telecommunication engineering students. 21st Century Electronic Devices. 3 Axis Digital Accelerometer. 3- D IC's. 3-D Chip Stacking Technique. 3D Internet. 3D MEMS.
9.1 The key components of a mechatronics system. Mechanical (gears, cams, linkages, levers, pulleys) Electrical/electronic (sensors and transducers, microprocessors, microcontrollers, actuators) Common drive devices (standard electrical motors, servo motors, stepper motors) 9.2 The operation, function and applications of programmable logic ...
ME 106 Lecture Materials. Introduction to ME 106 and Mechatronics [ppt] Syllabus [doc] Term project guidelines [doc] Review of basic electronics [ppt] Signal sources [ppt] RC filters [ppt] Notes on Lab 1 Intro to the Mechatronics Lab [ppt] LM35 data sheet [pdf]
Latest Mechatronics Engineering Seminar Topics. Borewell Rescue Robo Mechtric Road Ramp Hovercraft Infrared Curing and Convection Curing Aeroplane Propulsion System Running gearing Sidewinder Missile Smart Materials Transit Mixer & Concrete Pump Turbofan Engine Solar Sails. Ultrasonic Metal Welding Supercavitation
Mechatronics generally involves (i) implementing electronics control in a mechanical system (ii) enhancing existing mechanical design with intelligent control and (iii) replacing mechanical component with an electronic solution. This course will cover all aspects related with mechatronics such as sensors and transducers, actuators and ...
Mechatronics project topics : Mechatronics may be a multidisciplinary branch of engineering that has a mixture of engineering , electronics, telecommunications engineering, computer engineering, systems engineering and control engineering.As technology is progressing, the subbranches of engineering multiply and adapt. the target of mechatronics may be a design process that unifies these ...
In the next video you can see a presentation of the project. This is its content: An Introduction. Here I briefly talk about the Mechatronics as a field of study which enabled me to develop this kind of a device. The Arduino Mega 2560. Some basic features of this Arduino Board which I used in this project. 3D Models in Simulink Environment.
Presentation Transcript. Introduction to Mechatronics Jr-Lung (Eddie) Lin Department of Mechanical and Automation Engineering, I-Shuo University. Introduction Mechatronicsis synergistic integration of mechanical engineering, electronics and intelligent computer control in design and manufacture of products and processes.
NOC:Mechatronics (Video) Syllabus; Co-ordinated by : IIT Roorkee; Available from : 2020-11-18. Lec : 1; Modules / Lectures. Intro Video; UNIT 1. Introduction; ... Data Presentation Systems; UNIT 4. Introduction to Signal Conditioning & Op-Amp; OP-AMP As Signal Conditioner; Analogue To Digital Converters;
June 22, 2017. This post lists latest presentation topics for Mechanical engineering. These topics have been picked from wide areas of Mechanical Engineering like Robotics, Automobiles, Nano Technology etc. Adaptive Crusie Control Plus System. Ablative Materials.
Mechatronics Engineering Research Papers/Topics A programmable tool-kit for a smart weather system using predictive analytics at the Botswana International University of Science and Technology Abstract: This work presents a programmable toolkit that allows the design and implementation of a smart weather system(SWS) at a local level.